内容:
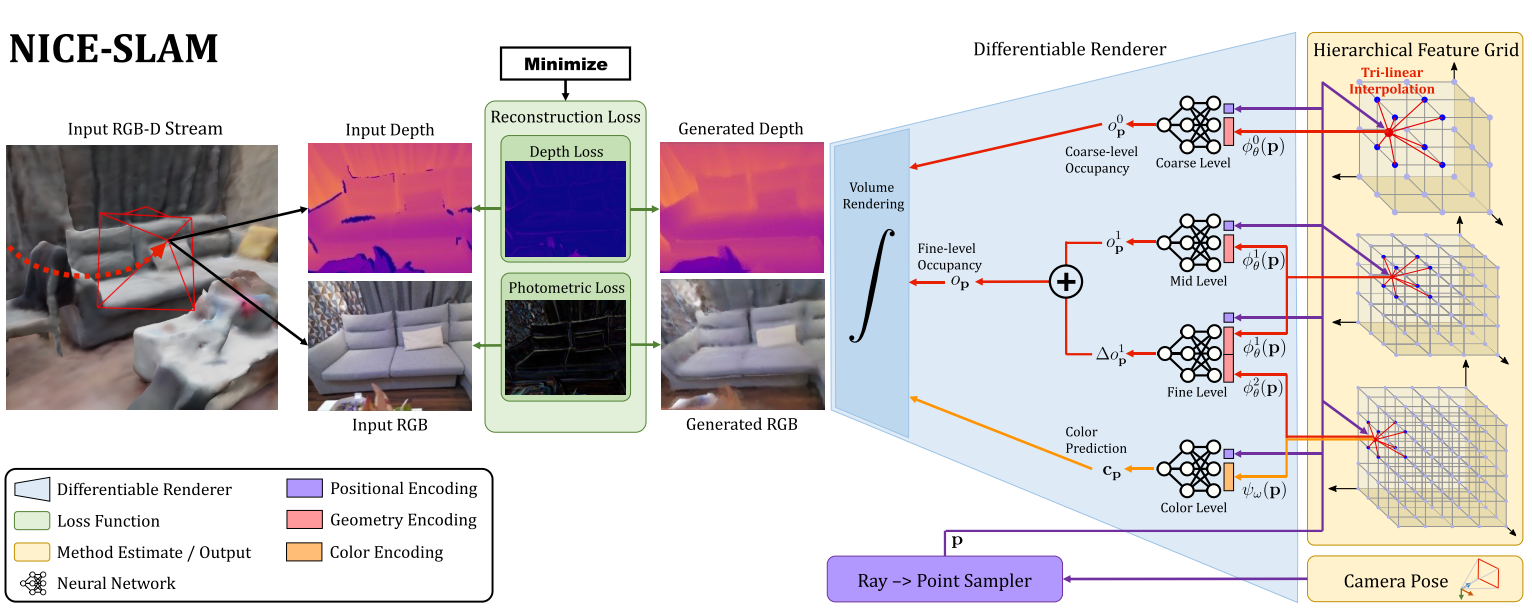
- 系统架构:NICE-SLAM是如何运行的
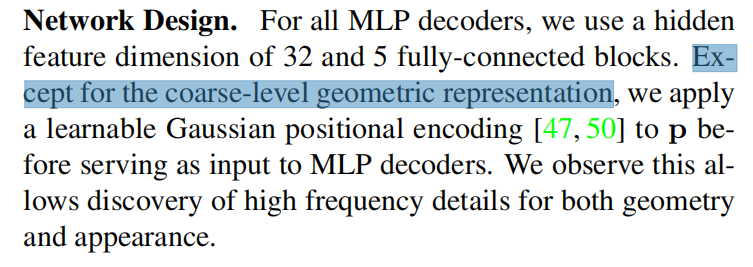
- 网络模型:网络是如何具体实现的
- 渲染:网络输出是怎么渲染得到图像和深度图的
代码:NICE-SLAM.py、decoder.py、Renderer.py、common.py
NeRF based SLAM学习笔记(5):NICE-SLAM源码阅读笔记(1)
系统架构
演示
# 展示训练的运行效果(Demo数据集,服务器)
python -W ignore run.py configs/Demo/demo.yaml
# 展示可视化的运行效果(Apartment数据集,本机)
python visualizer.py configs/Apartment/apartment.yaml --output output/vis/Apartment函数def grid_init(self, cfg)
论文对应部分:附录A.2. Hierarchical Feature Grid Initialization
Coarse-level Feature Grid:随机初始化;
Mid-level Feature Grid:也是随机初始化的,经验表明随机初始化具有更好的收敛性;
Fine-level Feature Grid:需要初始化到fine-level的decoder输出为0,毕竟这里给出来的是残差,初始化的残差肯定要是0。这样才能够保证从coarse-to-fine的优化过程中,能量是平稳过渡的。论文也提到,在对fine-level对应的decoder进行预训练的时候,增加了额外的正则化损失,保证如果fine-level的特征为0,那么无论mid-level的特征如何,输出的残差都应该为0。这样能够允许NICE-SLAM在运行的时候对fine-level的特征网格进行零初始化。
演示
import torch
import numpy as np
# 加载bound
bound=torch.from_numpy(np.array([[-5.8,11.3],[-4.0,4.5],[-7.9,4.9]]) * 1.0)
# 分别计算xyz轴的长度
xyz_len = bound[:, 1] - bound[:, 0]
# ============ 初始化一个特征网格 ============
# coarse要特别注意一下,有一个enlarge
# val_shape=list(map(int, (np.array(xyz_len * 2 / 3).tolist())))
# middle、fine、color
val_shape=list(map(int, (np.array([5.6,7.5,10]) / 0.16).tolist()))
# 交换XZ轴数据
val_shape[0], val_shape[2] = val_shape[2], val_shape[0]
# 定义特征网格的shape,即BCDHW
grid_val_shape = [1, 8, *val_shape]
# 初始化特征网格
feature_grid=torch.zeros(grid_val_shape).normal_(mean=0, std=0.01)
# 对于fine-level,特征尽量接近0
# feature_grid=torch.zeros(grid_val_shape).normal_(mean=0, std=0.0001)
# ============ 演示特征网格的使用 ============
# 初始化特征网格
feature_grid=torch.zeros([1,8,2,3,4]).normal_(mean=0, std=0.01)
# 提取某个点的特征
feature=feature_grid[0,...,1,2,3]网络模型
类class NICE(nn.Module)
论文对应部分:3.1. Hierarchical Scene Representation
对def forward(self, p, c_grid, stage='middle', **kwargs)的理解:
这部分主要服务于论文介绍的3.3. Mapping and Tracking,每个stage应该是和优化相关的,而不是和论文里提到的middle-leve、fine-level的输出相关。
下面是论文提到的Mapping阶段的三阶段优化:

演示
import torch
raw = torch.zeros(8, 4).float()
raw[..., -1]=0.5类class MLP(nn.Module)和类class MLP_no_xyz(nn.Module)
可以把nerf-pytorch的代码拿过来简单对比一下
相关链接:
- ConvONet论文:https://arxiv.org/pdf/2003.04618.pdf
- ConvONet代码:https://github.com/autonomousvision/convolutional_occupancy_networks/blob/master/src/conv_onet/models/decoder.py
- 类
GaussianFourierFeatureTransform对应的论文:https://arxiv.org/abs/2006.10739
演示“sample_grid_feature”的过程
import torch
import numpy as np
import torch.nn.functional as F
p_nor=torch.from_numpy(np.array(
[[ 0. , 0. , 0. ],
[ 0.1, 0.2, 0.3],
[-0.5, -0.6, -0.7],
[ 1. , 0. , -1. ]])).unsqueeze(0)
# [1, 4, 3]
# [1,point_num,3]
vgrid = p_nor[:, :, None, None].float()
# [1, 4, 1, 1, 3]
# [1,point_num,1,1,3]
feature_grid=torch.zeros([1,8,2,3,4]).normal_(mean=0, std=0.01)
# [1,8,2,3,4]
# [1,c_dim,D,H,W]
c = F.grid_sample(feature_grid, vgrid, padding_mode='border', align_corners=True, mode='bilinear').squeeze(-1).squeeze(-1)
# [1,8,4]
# [1,c_dim,point_num]
c = c.transpose(1, 2).squeeze(0)
# [point_num,c_dim]渲染
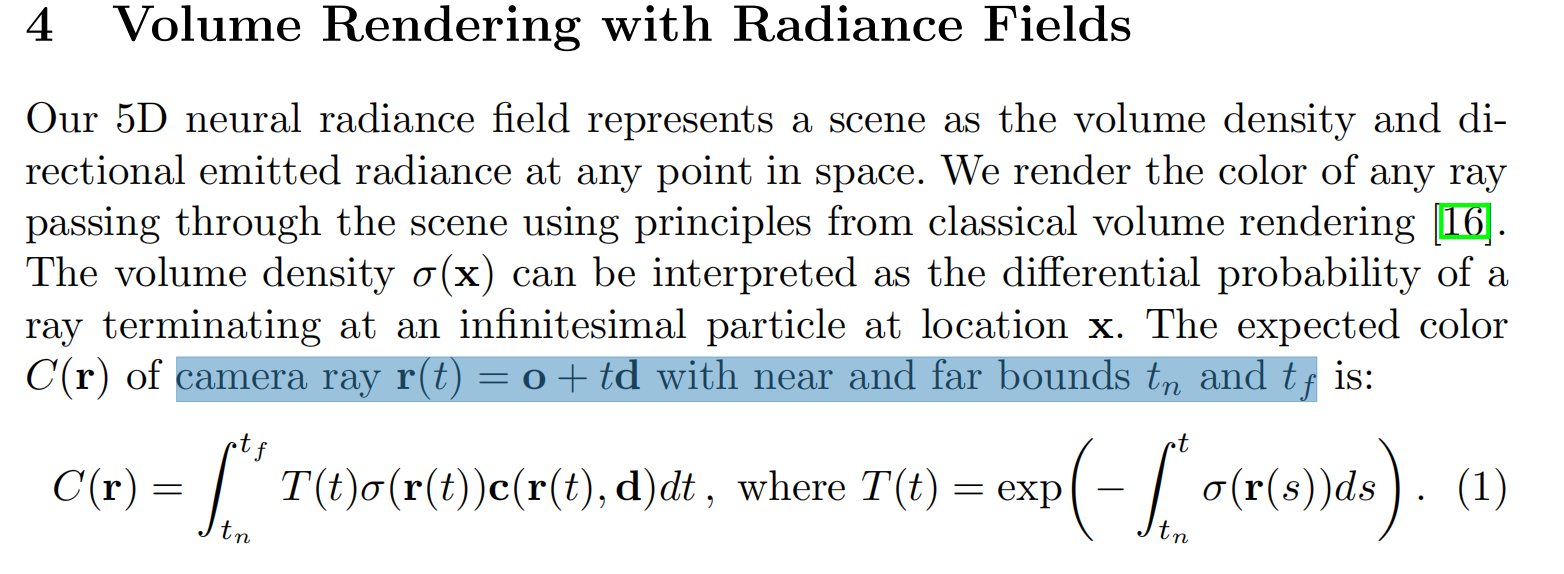
函数render_batch_ray
near和far可以参考NeRF论文这个部分:
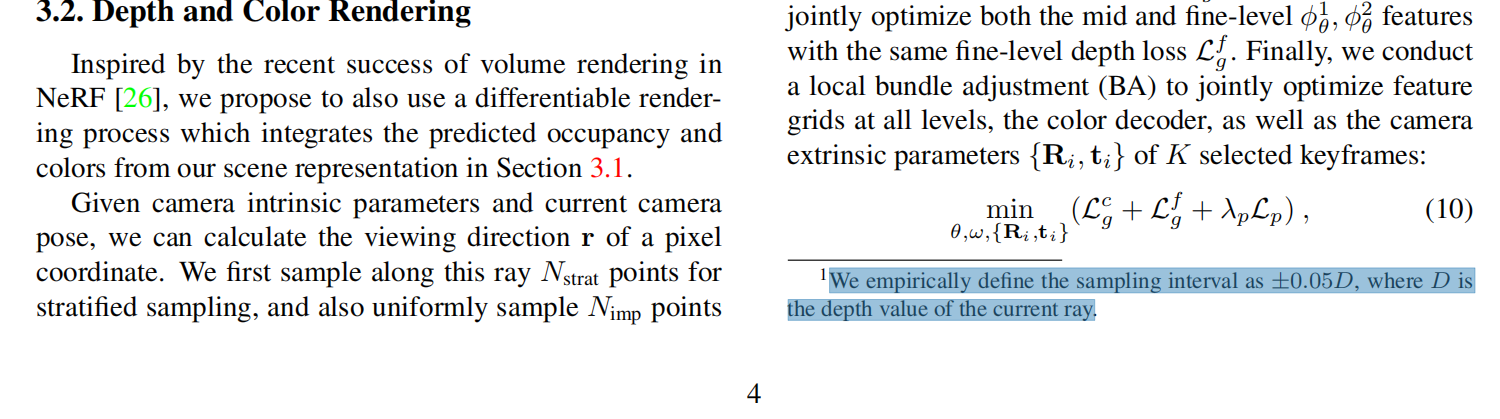
z_vals_surface可以参考NICE-SLAM论文3.2. Depth and Color Rendering
演示near的获取
import torch
# 假设只有三条射线,然后采样的数量N_samples=10
gt_depth=torch.tensor([[1],[3],[9]])
gt_depth = gt_depth.reshape(-1, 1) # 展开成向量
gt_depth_samples = gt_depth.repeat(1, 10)
near = gt_depth_samples * 0.01 # 每条射线的near根据这条射线对应的深度确定演示far_bb的获取
import torch
# bound
bound=torch.tensor([[-10,10],[-20,30],[-40,100]])
# 假设只有两条射线
# det_rays_o
det_rays_o=torch.tensor([[[-5],[-6],[7]],[[9],[-8],[-10]]])
# det_rays_d
det_rays_d=torch.tensor([[[1],[2],[3]],[[0.1],[0.5],[5]]])
# t的计算
t = (bound - det_rays_o)
t = t / det_rays_d
# far_bb的计算
torch.max(t, dim=2)[0]
torch.min(torch.max(t, dim=2)[0], dim=1)[0]演示z_vals_surface的获取
import torch
# ========== 有深度区域 ==========
# 假设只有五条射线,其中两条条射线没有深度,表面附近采样的数量N_surface=10
gt_depth=torch.tensor([[1],[0],[3],[0],[9]])
# 拿到有深度的部分
gt_none_zero_mask = gt_depth > 0
gt_none_zero = gt_depth[gt_none_zero_mask]
gt_none_zero = gt_none_zero.unsqueeze(-1)
# 每个采样点所属射线对应的深度
gt_depth_surface = gt_none_zero.repeat(1, 10)
# 间隔
t_vals_surface = torch.linspace(0., 1., steps=10).double()
# 在Depth+-0.05Depth的区域进行采样
z_vals_surface_depth_none_zero = (0.95 * gt_depth_surface * (1. - t_vals_surface) + 1.05 * gt_depth_surface * (t_vals_surface))
# 保存结果到最终的z_vals_surface中
z_vals_surface = torch.zeros(gt_depth.shape[0], 10).double()
gt_none_zero_mask = gt_none_zero_mask.squeeze(-1)
z_vals_surface[gt_none_zero_mask, :] = z_vals_surface_depth_none_zero
# ========== 无深度区域 ==========
near_surface = 0.001
far_surface = torch.max(gt_depth)
z_vals_surface_depth_zero = (near_surface * (1. - t_vals_surface) + far_surface * (t_vals_surface))
z_vals_surface_depth_zero.unsqueeze(0).repeat((~gt_none_zero_mask).sum(), 1)
# 保存结果到最终的z_vals_surface中
z_vals_surface[~gt_none_zero_mask, :] = z_vals_surface_depth_zero演示z_vals的获取
import torch
near=0.01
far=3
# 假设采样5个点
t_vals = torch.linspace(0., 1., steps=5)
# 根据深度采样(均匀的)
z_vals = near * (1. - t_vals) + far * (t_vals)
# 每个间隔内随机采样(随机的)
mids = .5 * (z_vals[..., 1:] + z_vals[..., :-1])
upper = torch.cat([mids, z_vals[..., -1:]], -1)
lower = torch.cat([z_vals[..., :1], mids], -1)
t_rand = torch.rand(z_vals.shape)
z_vals = lower + (upper - lower) * t_rand演示采样点的计算
import torch
# 假设只有两条射线
# det_rays_o
rays_o=torch.tensor([[[-5],[-6],[7]],[[9],[-8],[-10]]])
# det_rays_d
rays_d=torch.tensor([[[1],[2],[3]],[[0.1],[0.5],[5]]])
# 假设采样10+5个点,N_samples=5,N_surface=3
z_vals=torch.tensor([0.0100, 0.3837, 1.1313, 1.8788, 2.6263])
z_vals_surface=torch.tensor([1.000, 1.1086, 1.2122])
# 合并N_samples和N_surface,再从小到大排序
z_vals, _ = torch.sort(torch.cat([z_vals, z_vals_surface.double()], -1), -1)
# 得到最后的采样点
pts = rays_o[..., None, :] + rays_d[..., None, :] * z_vals[..., :, None]
pointsf = pts.reshape(-1, 3)


