详解四元数
昨天看了《视觉SLAM十四讲》第三讲四元数部分的内容,对里面的一些东西不是很懂,这两天好好地推导了一下。
本文主要介绍:
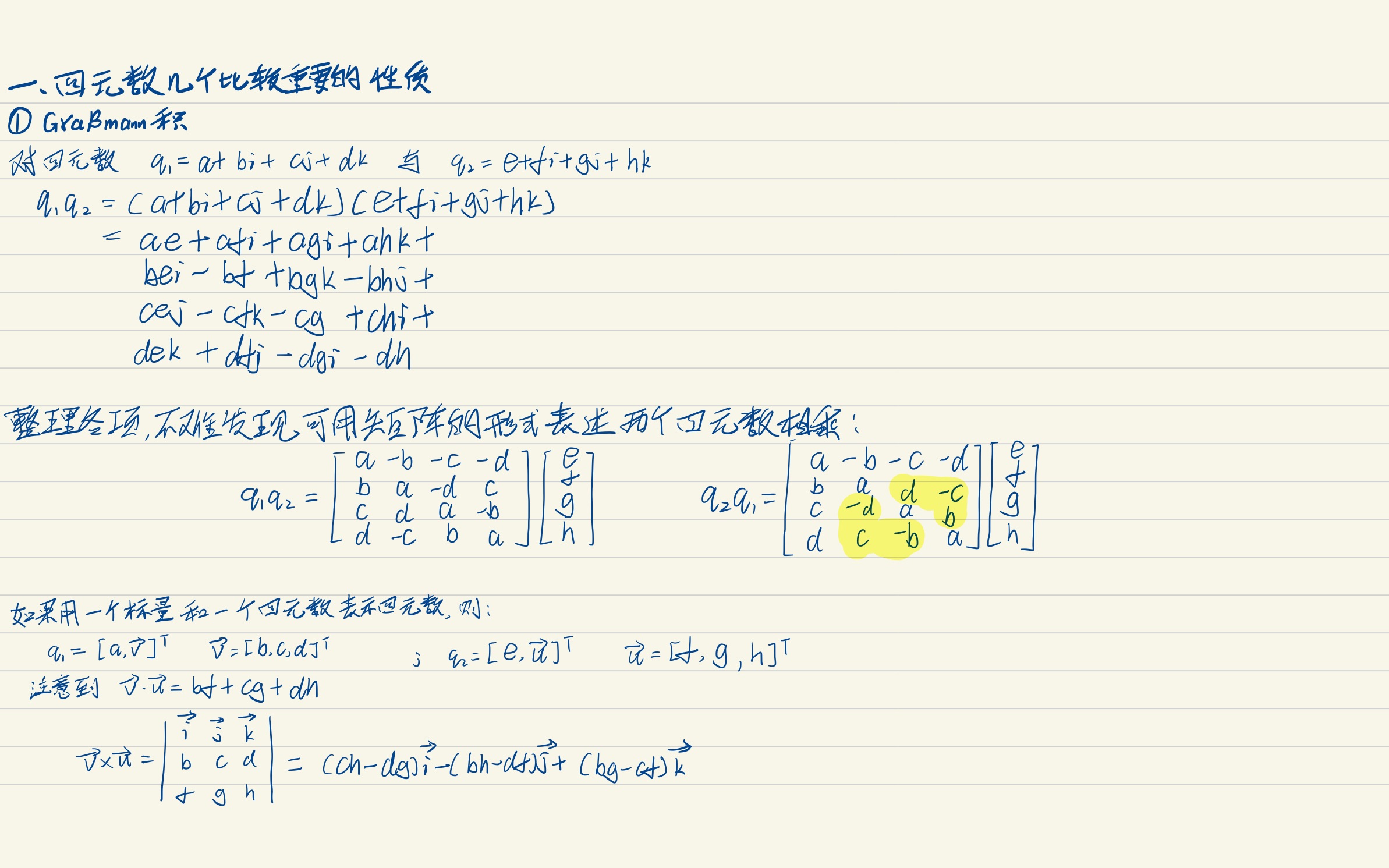
- 四元数几个重要性质、推论的推导
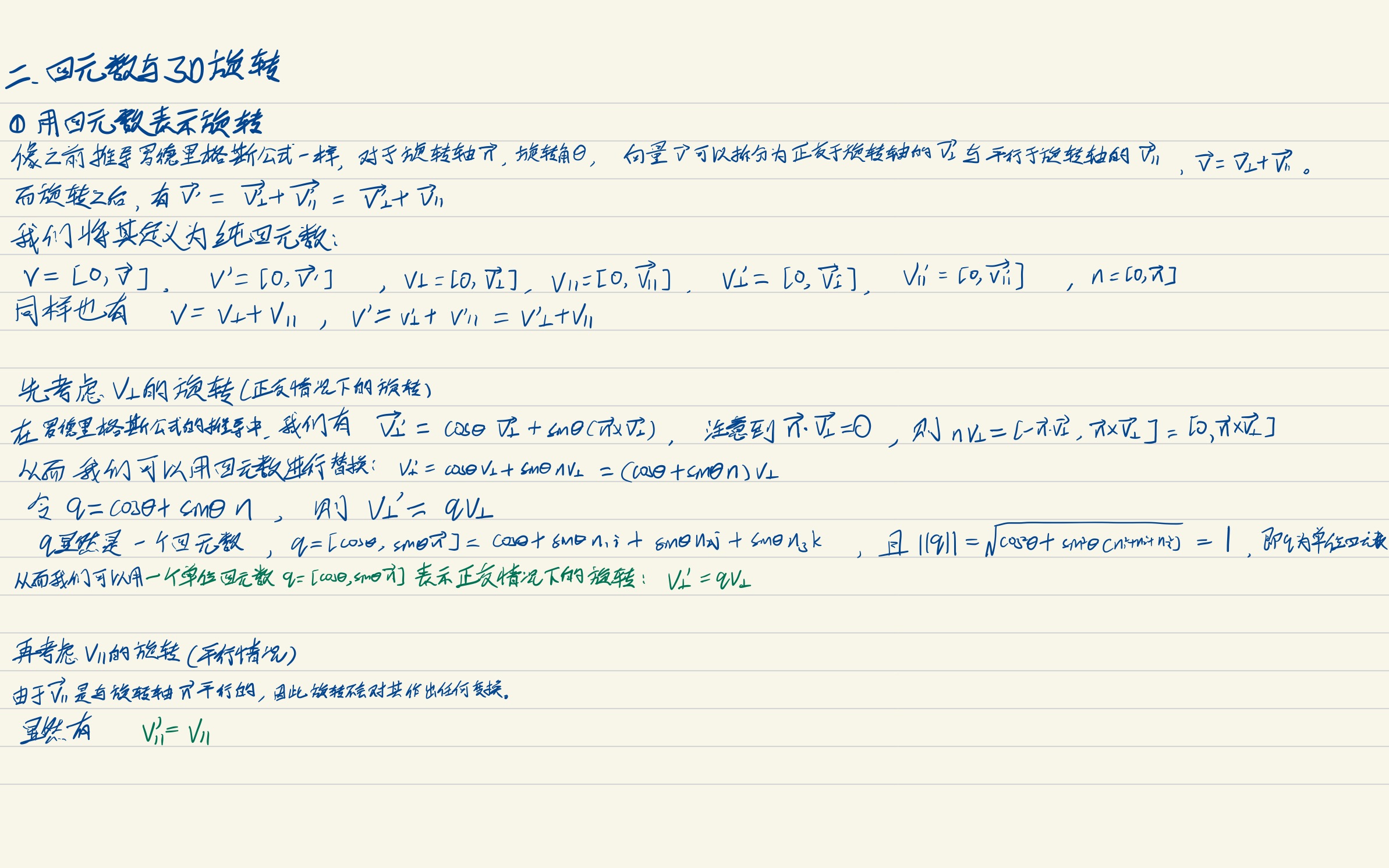
- 如何用四元数表示3D旋转
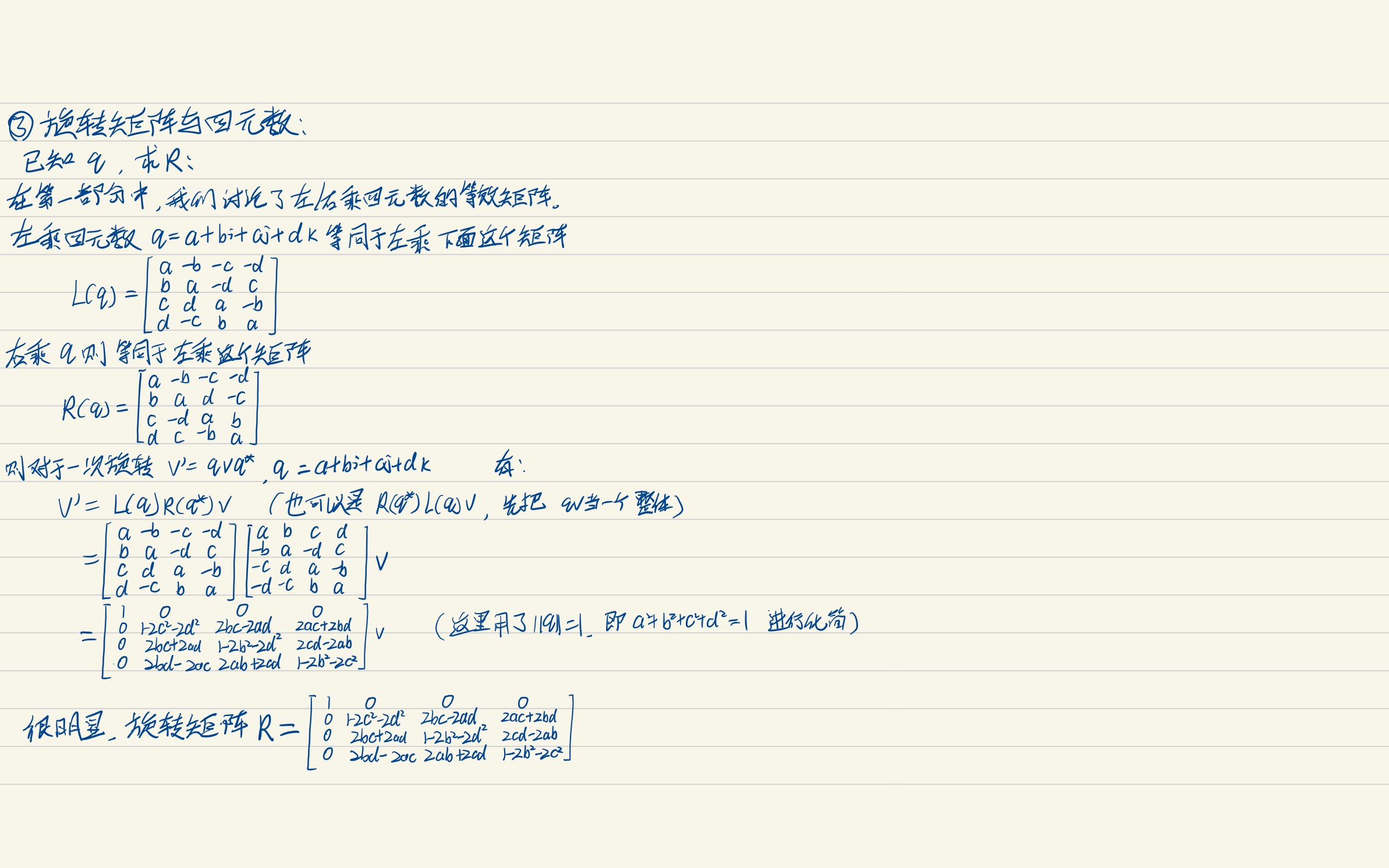
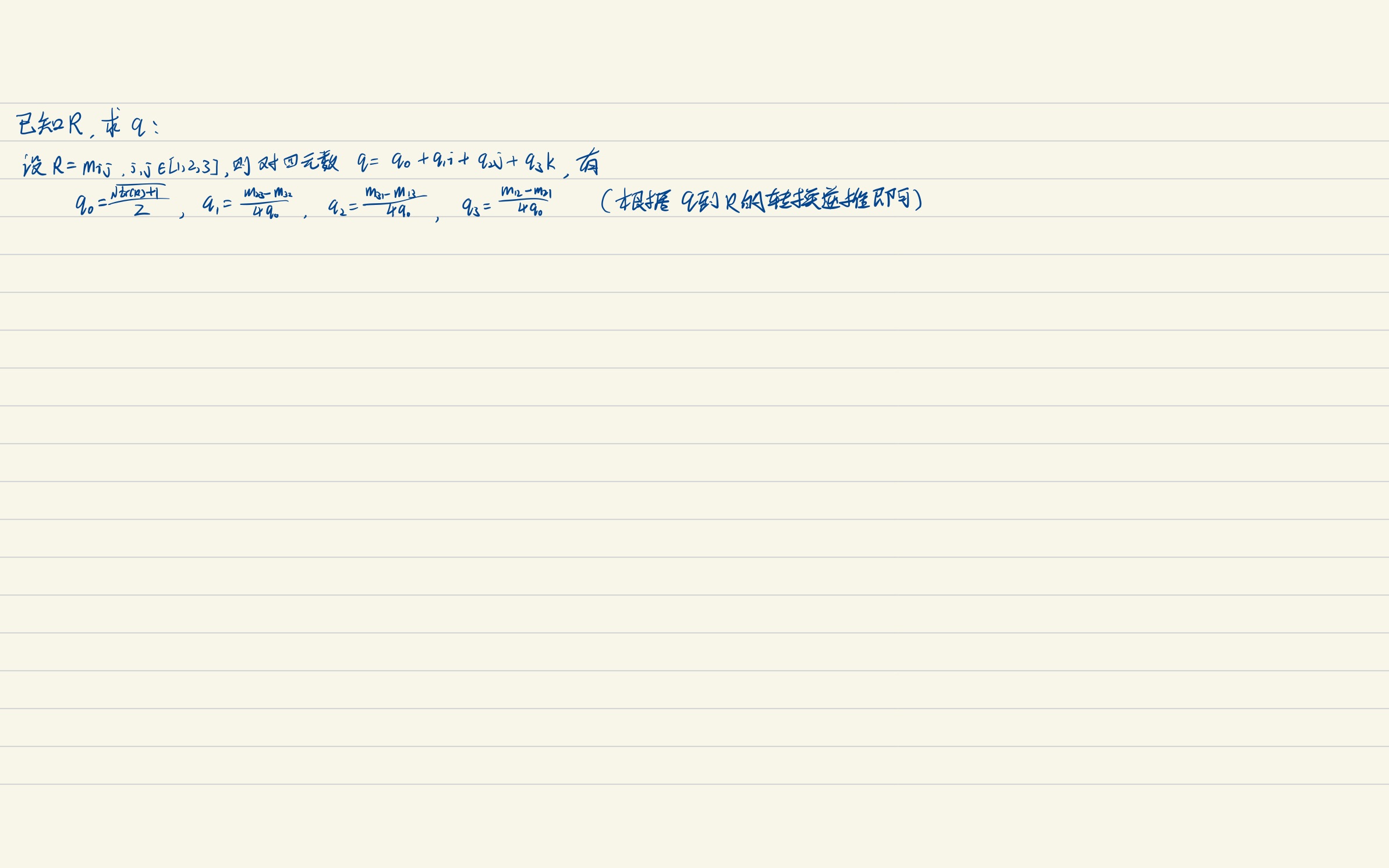
- 四元数、旋转向量、旋转矩阵之间的转换关系
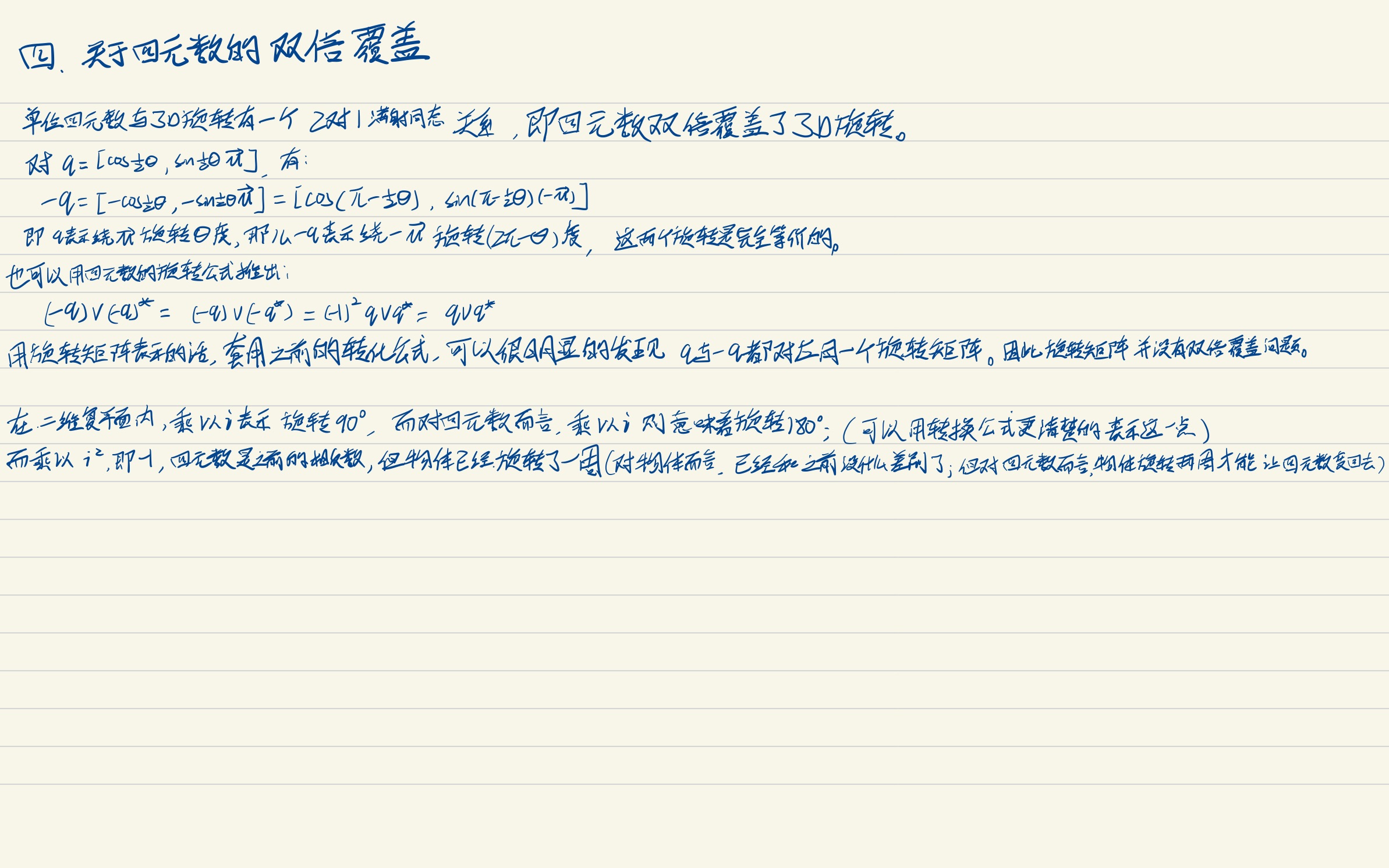
- 四元数的双倍覆盖(严谨证明暂未给出)
由于四元数推导这边的公式比较多,手写要方便一些,所以下面直接给出手写的推导证明过程。
一、四元数几个比较重要的性质

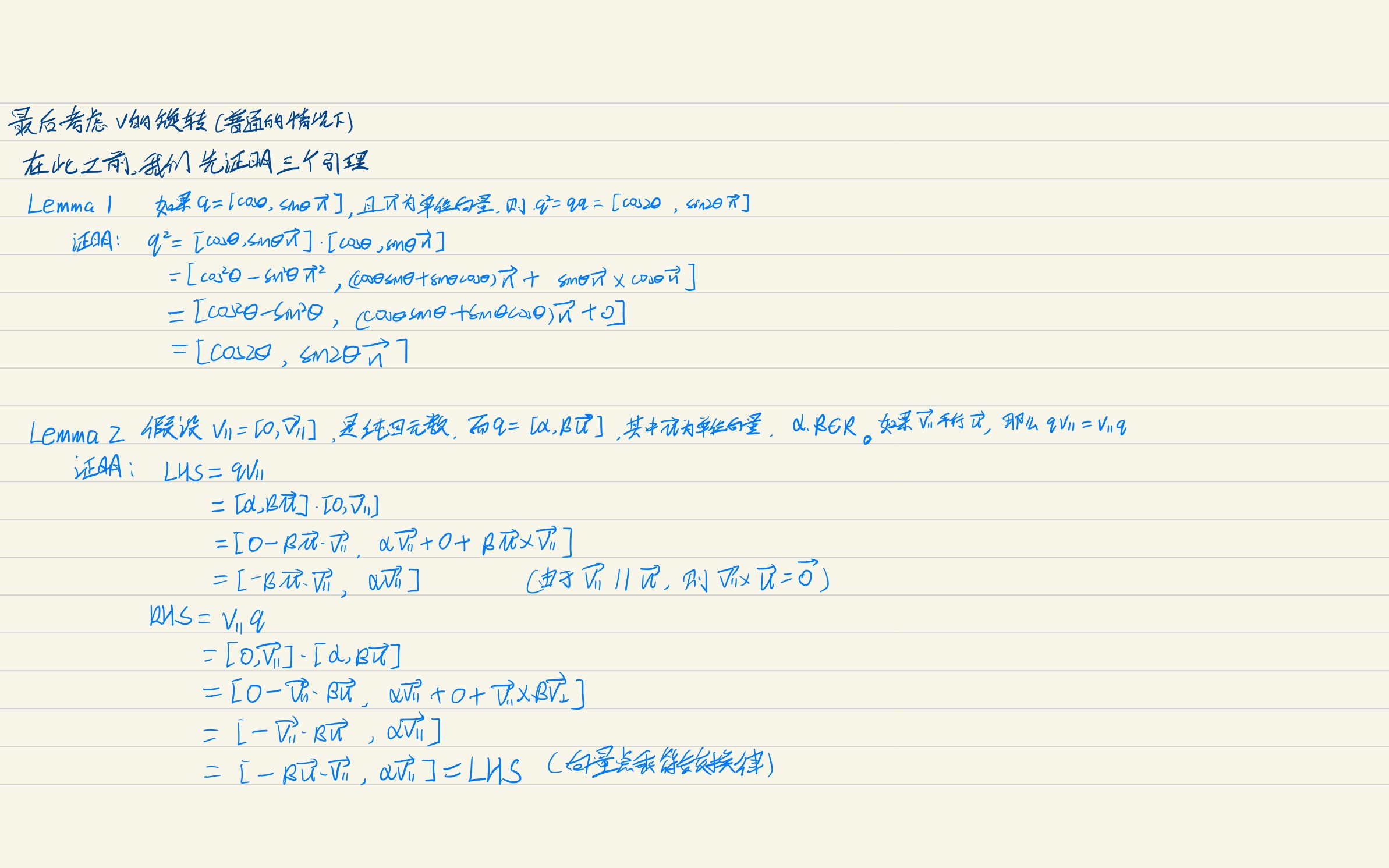
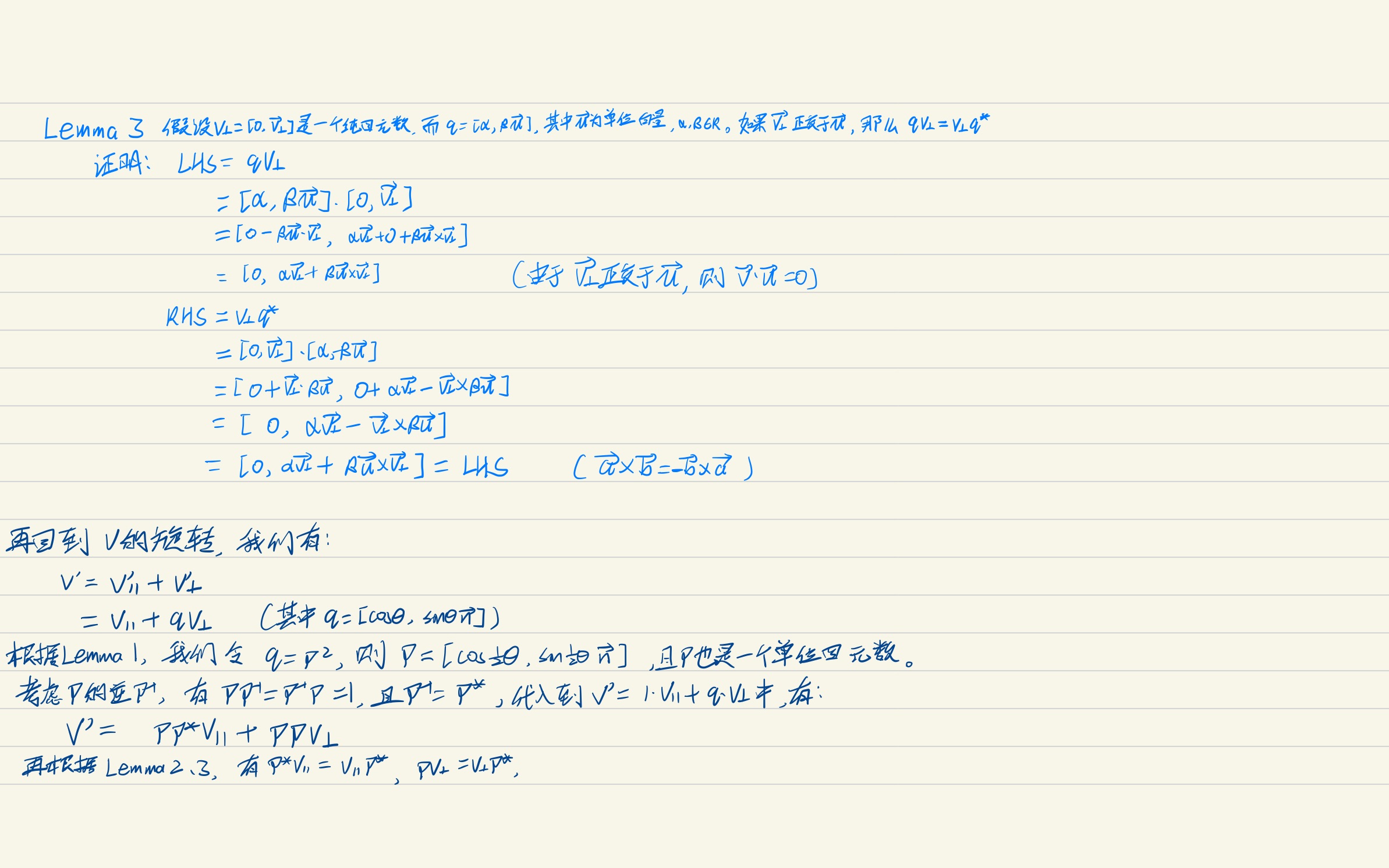
二、四元数与3D旋转

三、四元数、旋转向量、旋转矩阵之间的相互表示

四、关于四元数的双倍覆盖
昨天看了《视觉SLAM十四讲》第三讲四元数部分的内容,对里面的一些东西不是很懂,这两天好好地推导了一下。
本文主要介绍:
由于四元数推导这边的公式比较多,手写要方便一些,所以下面直接给出手写的推导证明过程。
 解决source多个ROS工作空间时的覆盖问题
解决source多个ROS工作空间时的覆盖问题
 罗德里格斯公式推导
罗德里格斯公式推导

