DenseSplat: Densifying Gaussian Splatting SLAM with Neural Radiance Prior
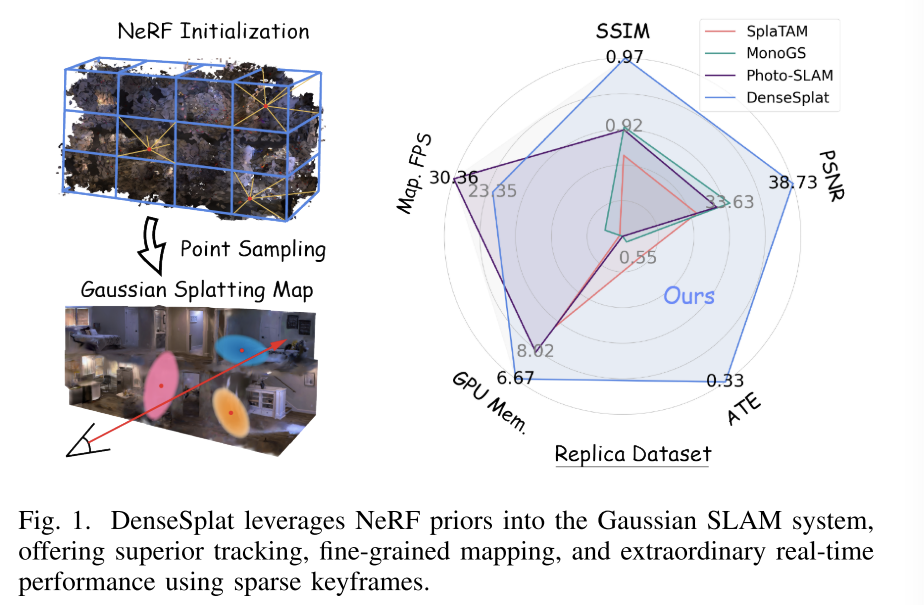
从这张图看,GPU内存占用还是挺高,而且fps也没有特别突出。
论文的motivation:Gaussian SLAM systems excel in real-time rendering and fine-grained reconstruction compared to NeRF-based systems. However, their reliance on extensive keyframes is impractical for deployment in real-world robotic systems, which typically operate under sparse-view conditions that can result in substantial holes in the map.
这个motivation看着,不是很令人信服
论文的核心思路:To address these challenges, we propose employing NeRF priors to densify the Gaussian SLAM system. This densification is achieved through two primary mechanisms using the NeRF model: (1) its interpolation capabilities efficiently close the gaps in the map with densely positioned Gaussian primitives, and (2) it offers a robust initialization of Gaussian primitives that can be densified using extremely sparse keyframes. Moreover, NeRF-based sampling ensures an even distribution of Gaussian primitives aligned with the scene geometry and allows for manageable granularity in the scene representation through specific sampling ratios. Coupled with loop closure and bundle adjustment (BA), our method delivers state-of-the art performance across large-scale synthetic and real-world datasets.
核心思路就是标黑的这句话:使用NeRF先验来实现Gaussian的致密化。
论文的contribution:
We propose DenseSplat, the first SLAM system combining the advantages of NeRF and 3DGS, capable of realtime tracking, mapping, and loop correction using only sparsely sampled keyframes.
能够只使用稀疏关键帧运行整个SLAM系统。
By leveraging NeRF priors, DenseSplat effectively fills the gaps from unobserved or obstructed viewpoints.
在NeRF的先验下,可以有效地填补空洞。
We implement geometry-aware primitive sampling and pruning strategies that control the granularity of the Gaussian representation and prune inactive primitives, ensuring a high-fidelity map and real-time processing.
几何感知的原语采样和修剪策略,控制高斯表示的粒度和修剪不活跃的原语
We compare our method with state-of-the-art (SOTA) approaches on multiple datasets, including a challenging large-scale apartment dataset, where DenseSplat achieves superior performance.
SOTA,而且跑了一个大规模公寓的数据集?
System Pipeline
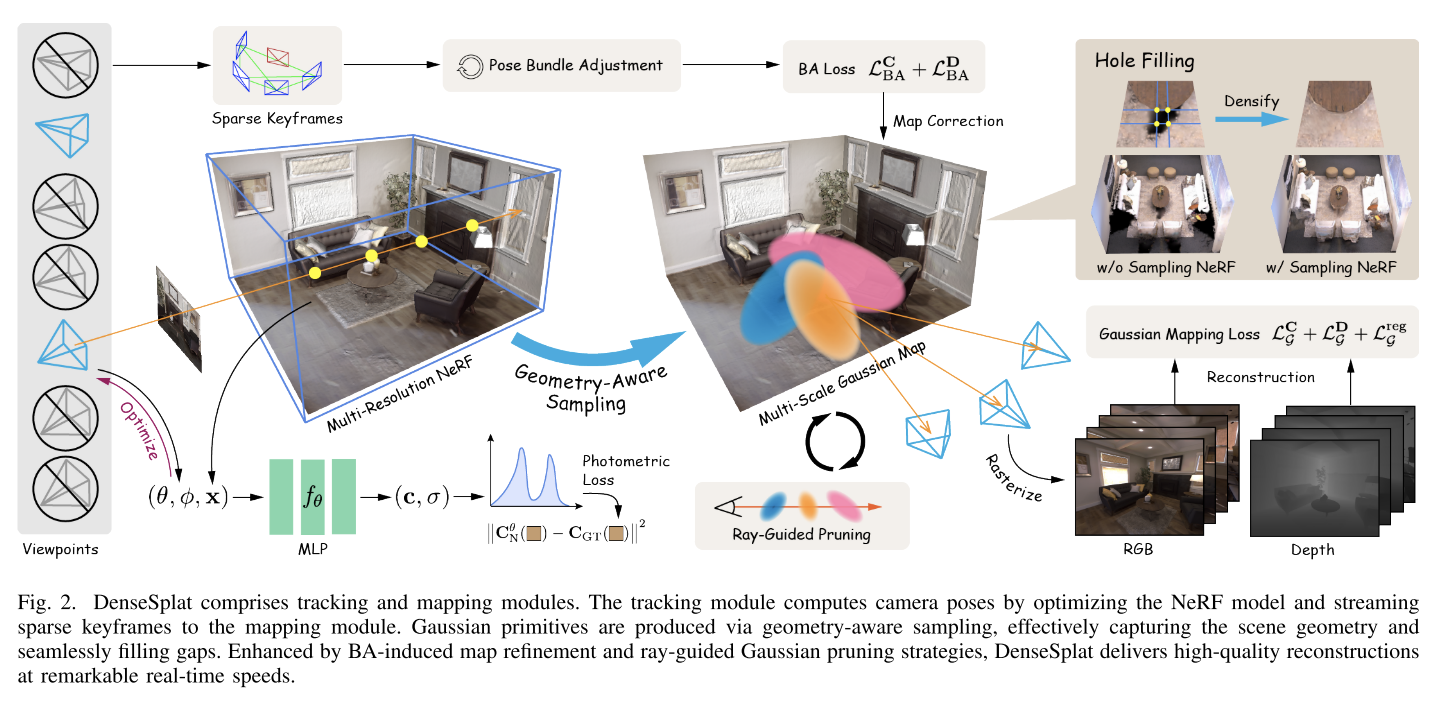
问题:NeRF与3DGS相比,有很好的插值能力,这带来了很好的空洞填补的能力。如果不用NeRF,3DGS可能只能填充拍到的部分,对于拍摄死角还是无法填补空洞。
系统分为Tracking和Mapping。
Tracking:
论文提到的做法:NeRF-based Camera Tracking,apply loop closure and bundle adjustment based on the fine-grained Gaussian map to correct accumulative drift.
说白了就是Tracking就是一个小的NeRF SLAM。。。然后手动接了一个gaussian mapping的后端。
Mapping:
论文提到的做法:Fine-grained Gaussian Map,这部分讲的有点点混乱,还是看论文了。
Loop Closure:
非常僵硬的地图矫正策略,企图通过优化的方式来实现loop correct,论文的说法是:our method supports real-time re-rendering and the correction of BA-induced drift errors.
从这些信息来看的话,我严重怀疑这是一个基于Co-SLAM套了个3DGS mapping的工作。
Experiment
看实验的话,比较的还是老一套,做得好的SLAM系统就那么几个:
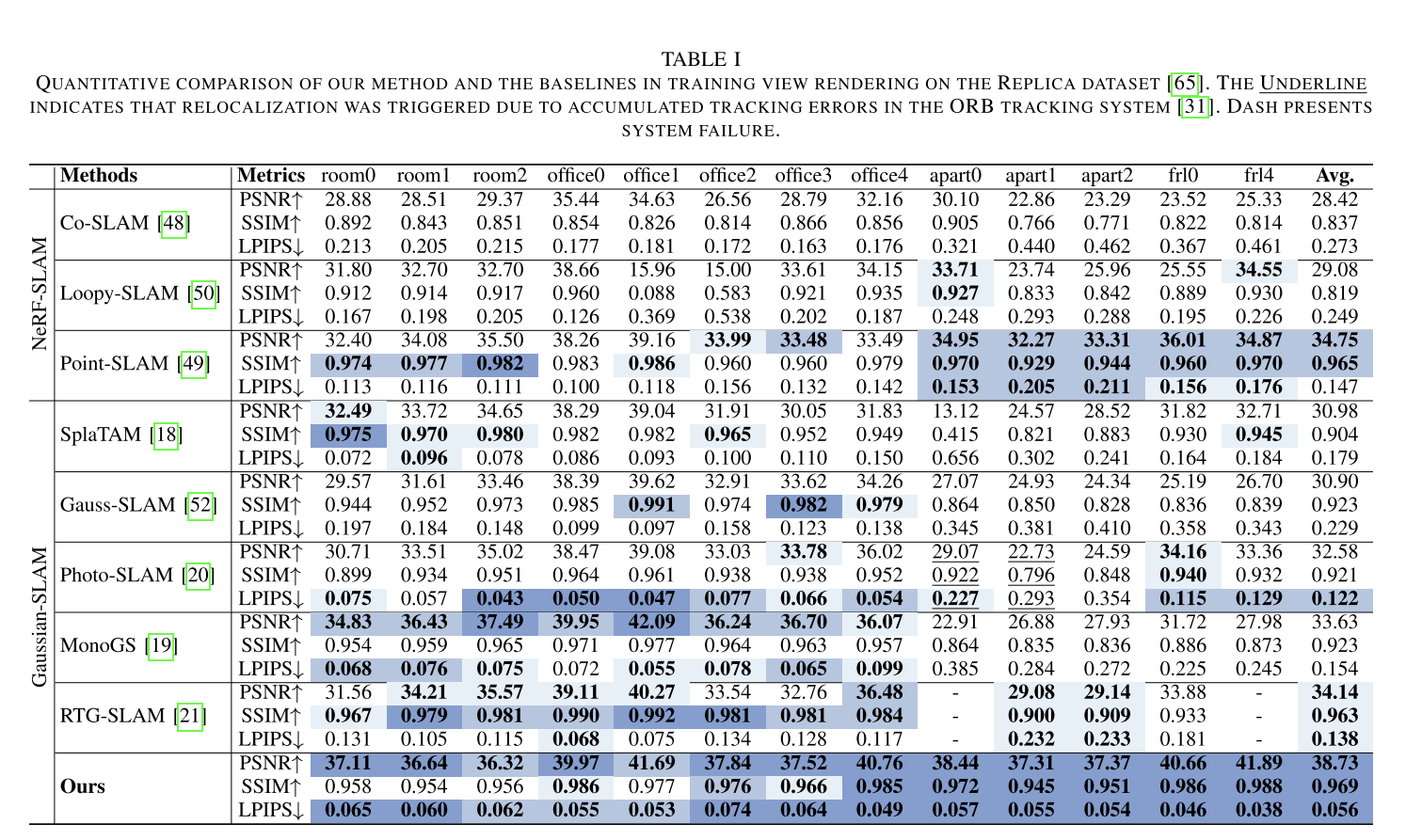
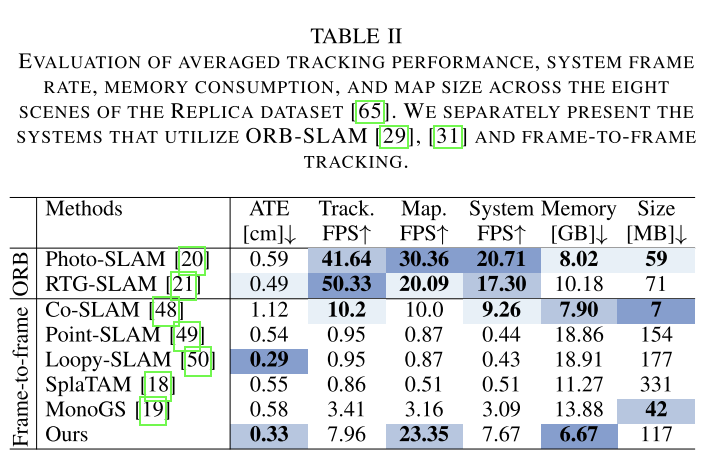
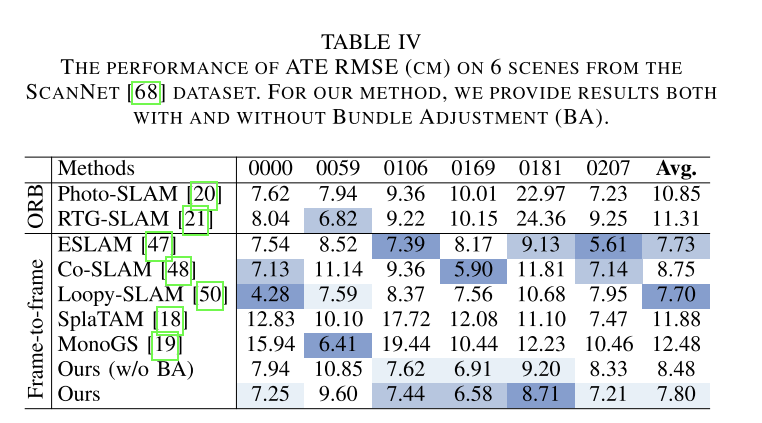
从这个实验来看的话,很多地方都比较接近Co-SLAM的表现。