CS231A Lecture 3:Camera Calibration
Reading:
[FP] Chapter 1 “Geometric Camera Calibration”
[HZ] Chapter 7 “Computation of Camera Matrix P”
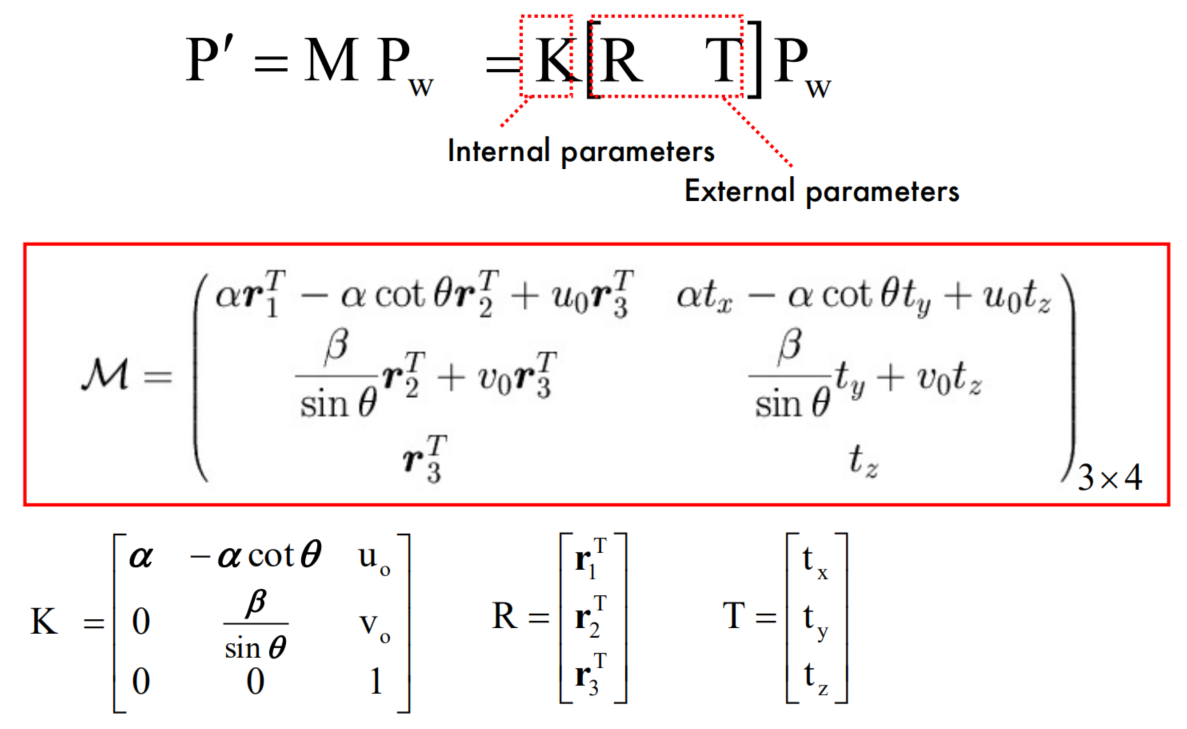
Internal and External parameters
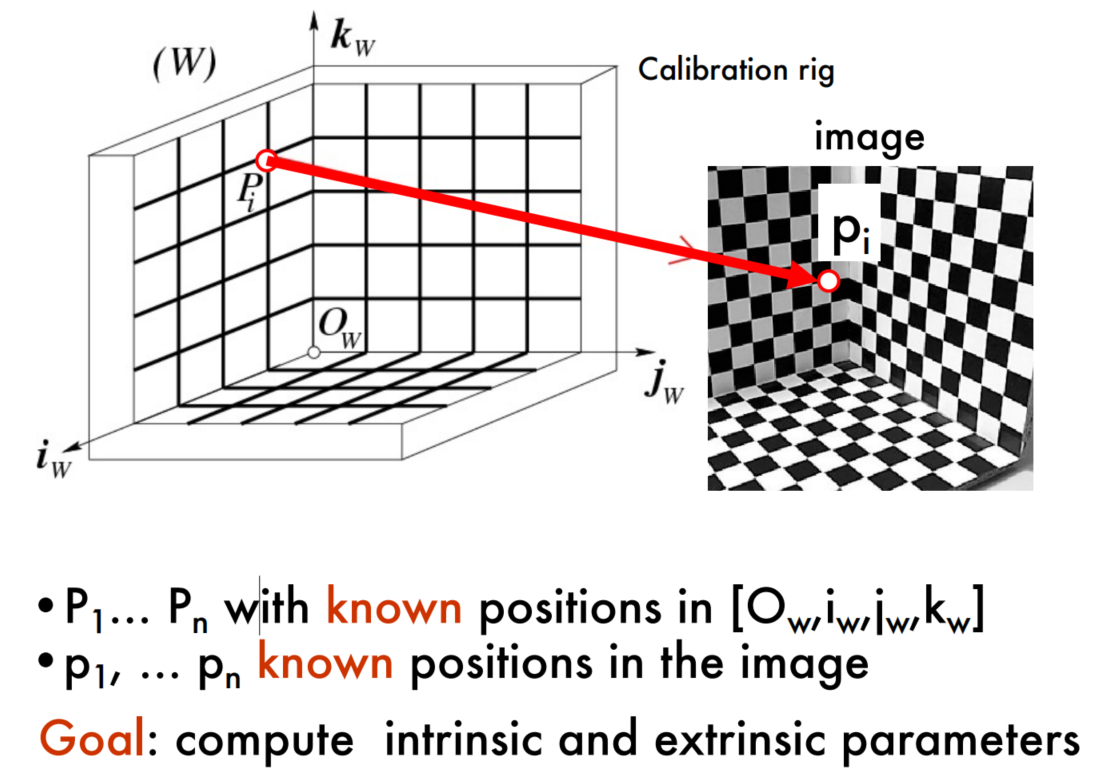
Calibration Problem
Goal
Estimate intrinsic and extrinsic parameters from 1 or multiple images
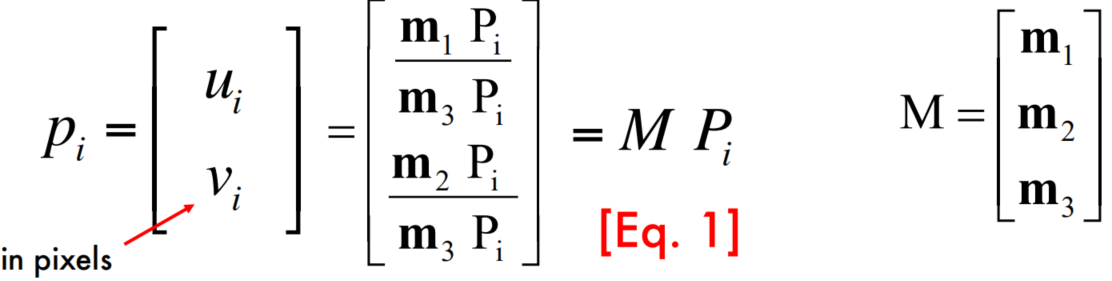
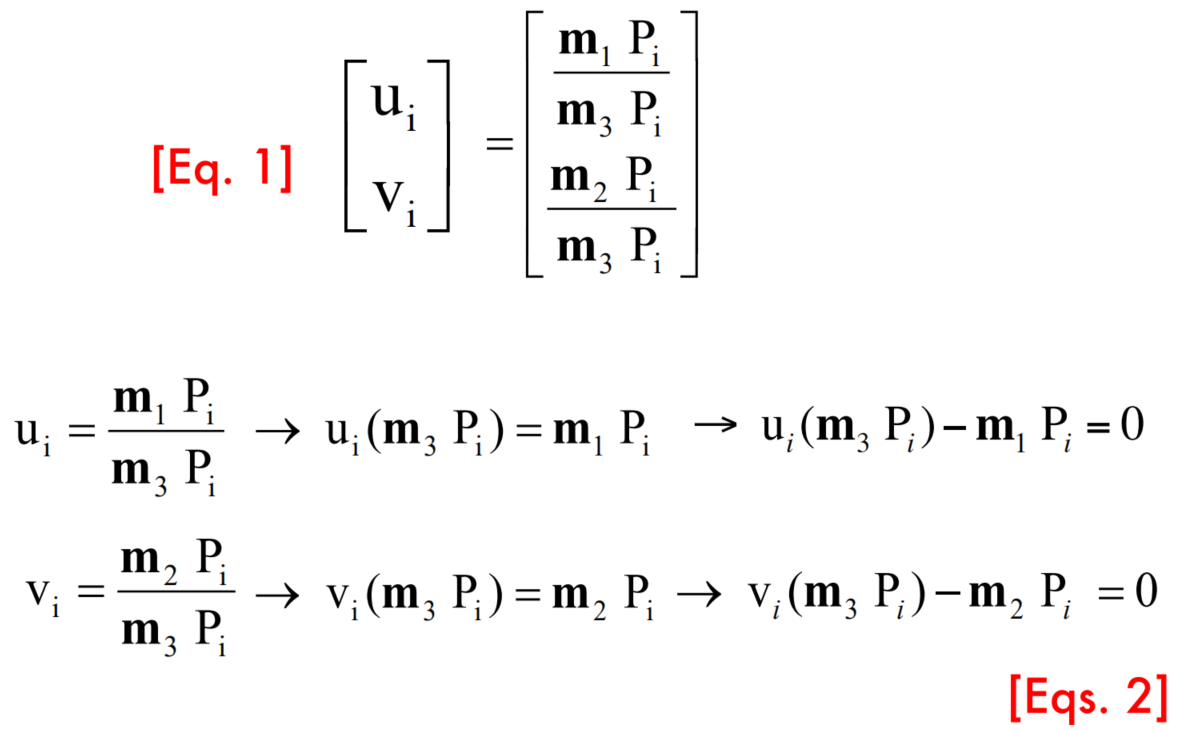
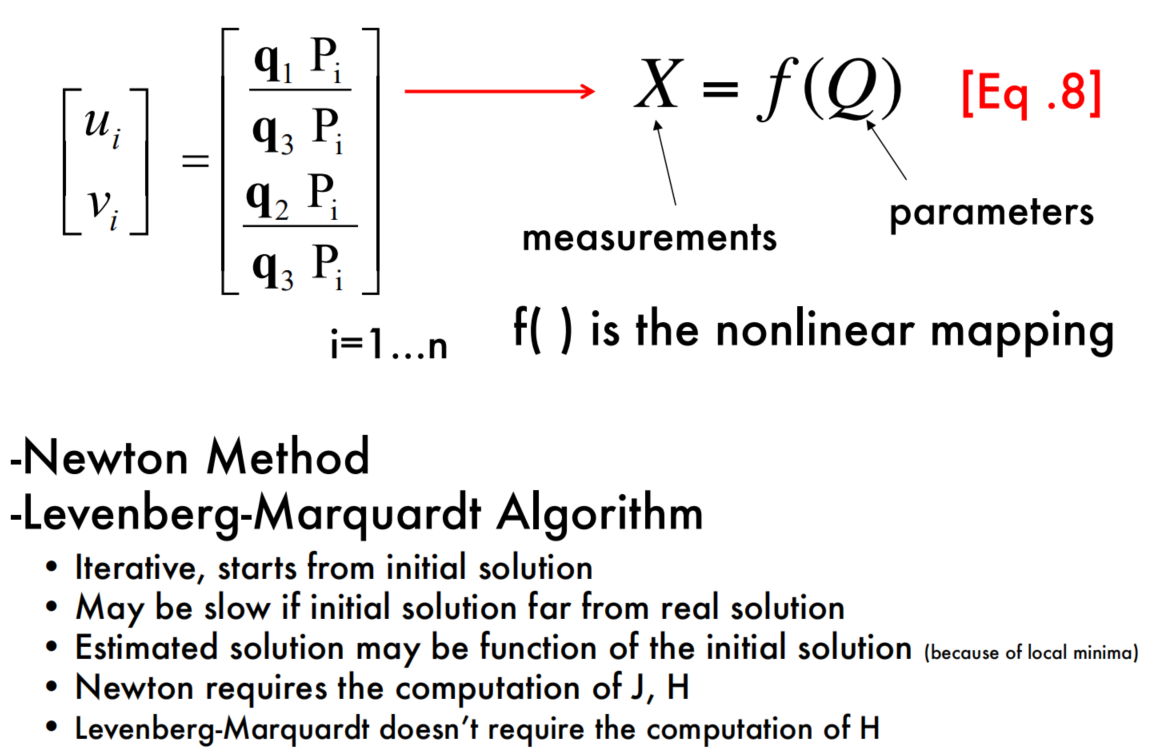
Mathematical Expression
How many correspondences do we need?
M has 11 unknowns
We need 11 equations
6 correspondences would do it
In practice, using more than 6 correspondences enables more robust results
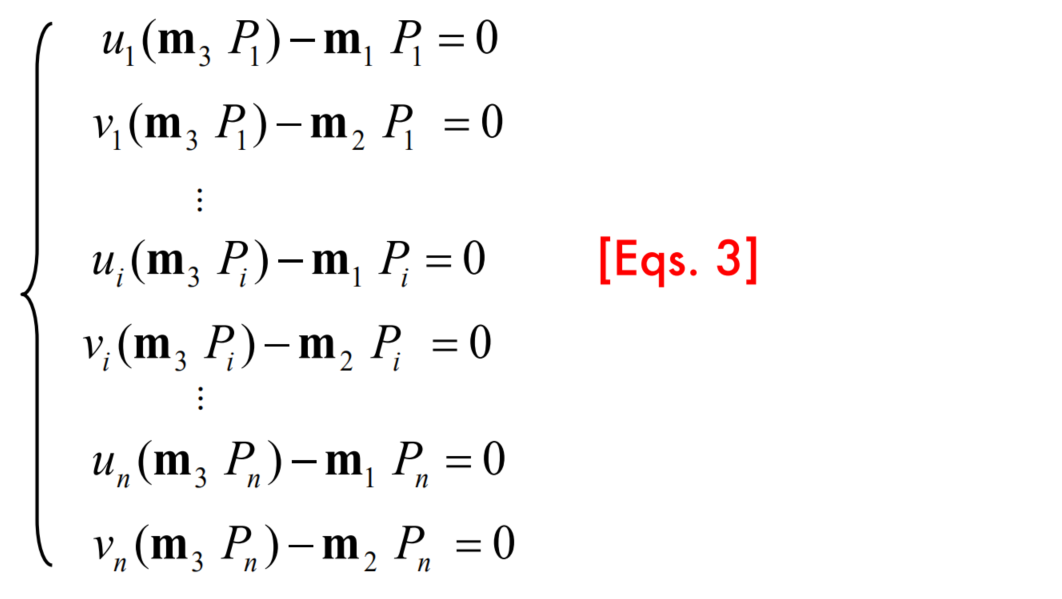
How to list equations?
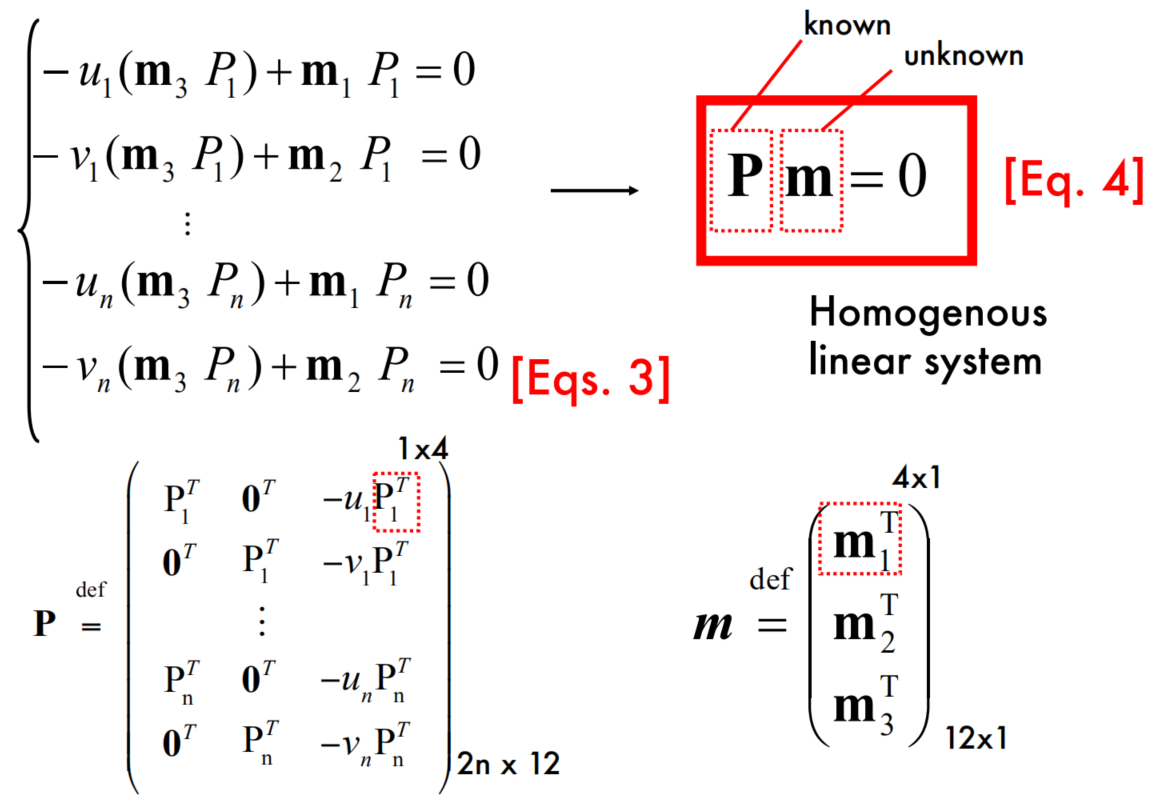
Homogeneous M x N Linear Systems
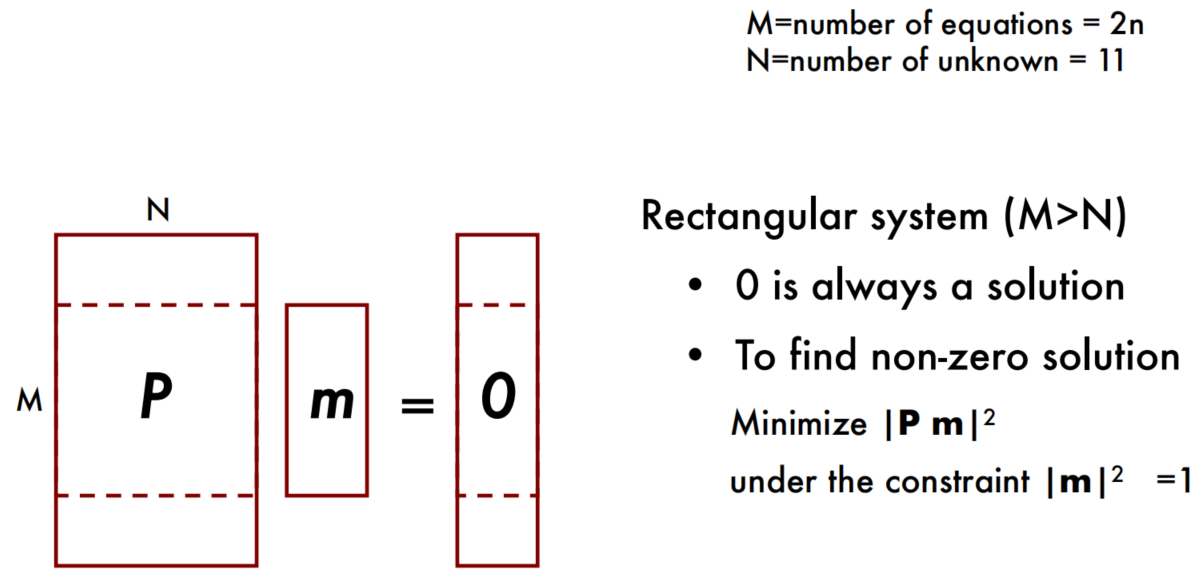
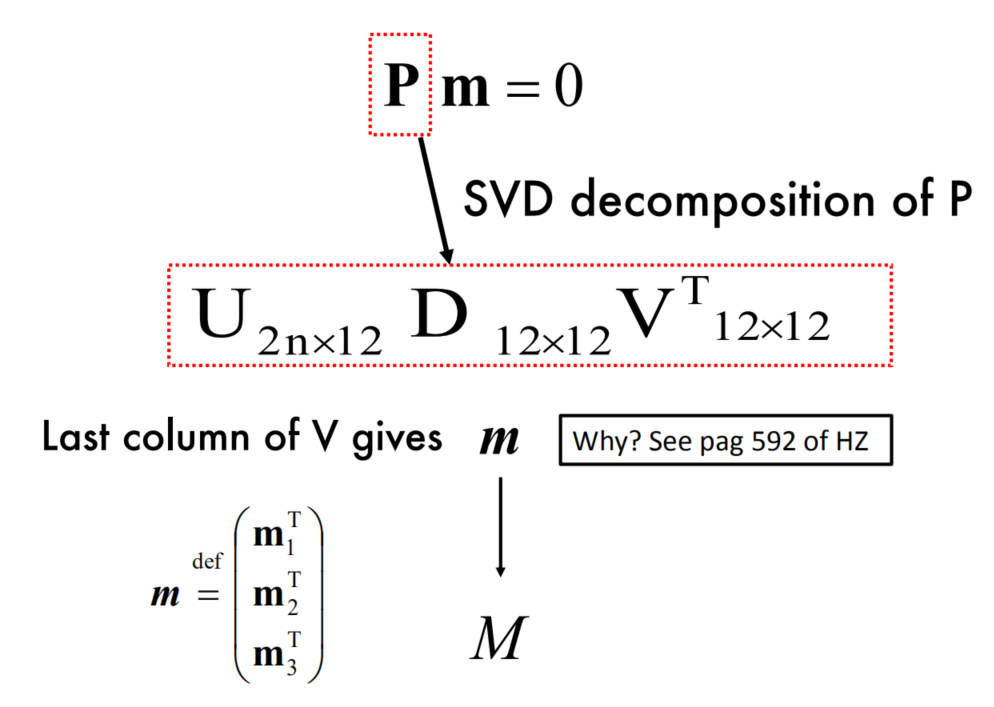
Solve calibration problem via SVD decomposition
Calibration Problem
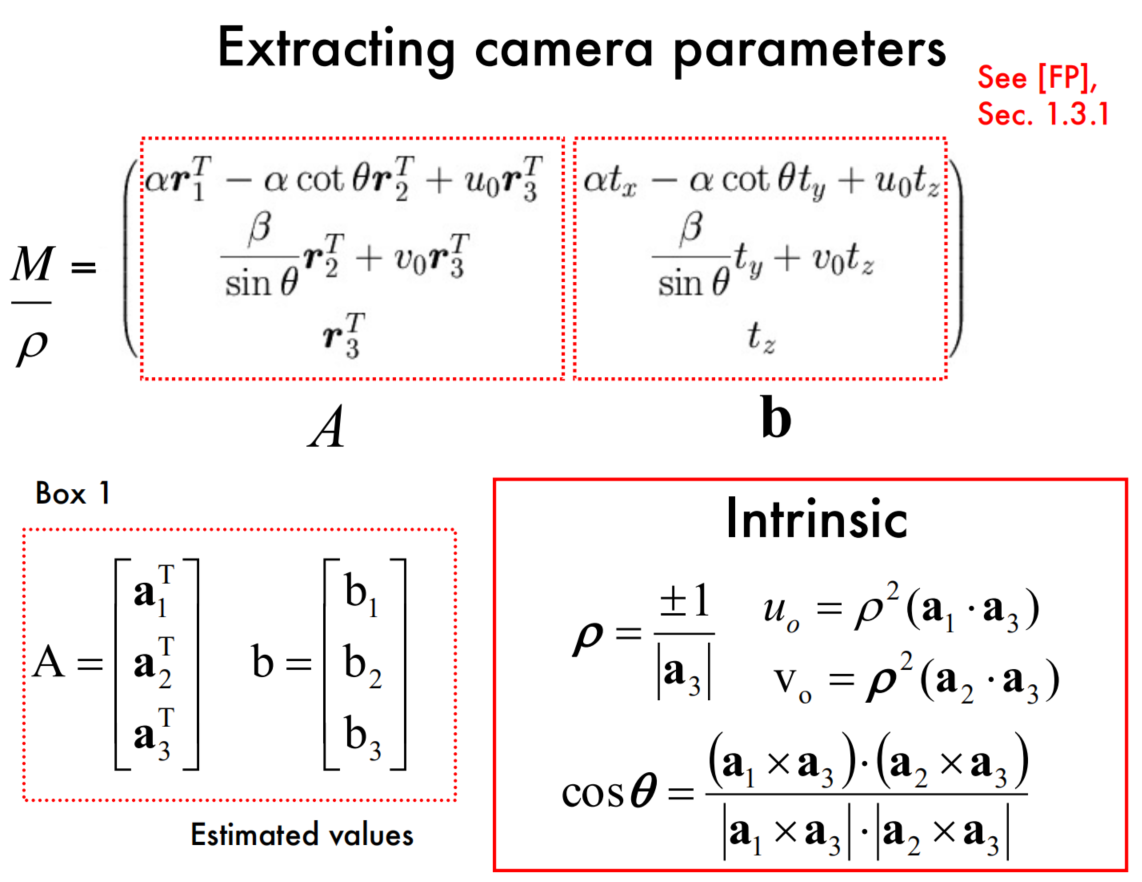
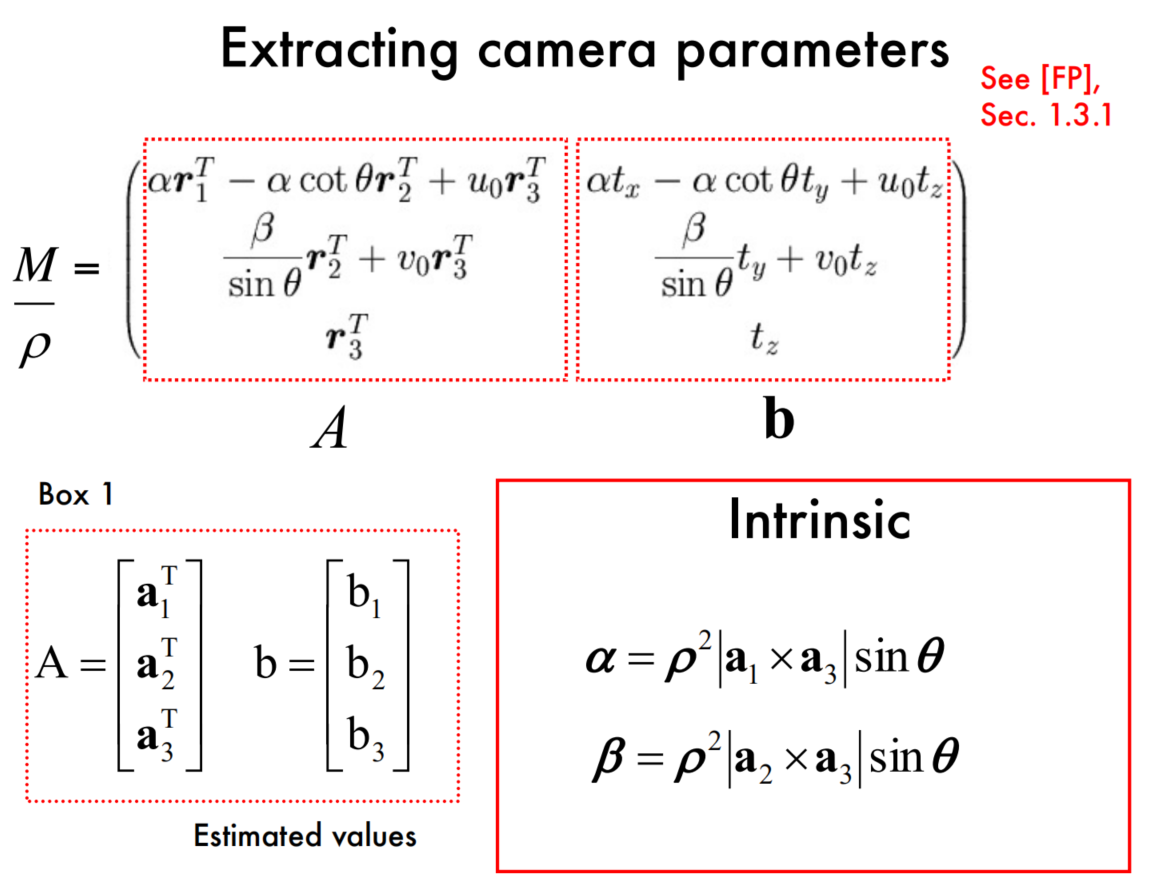
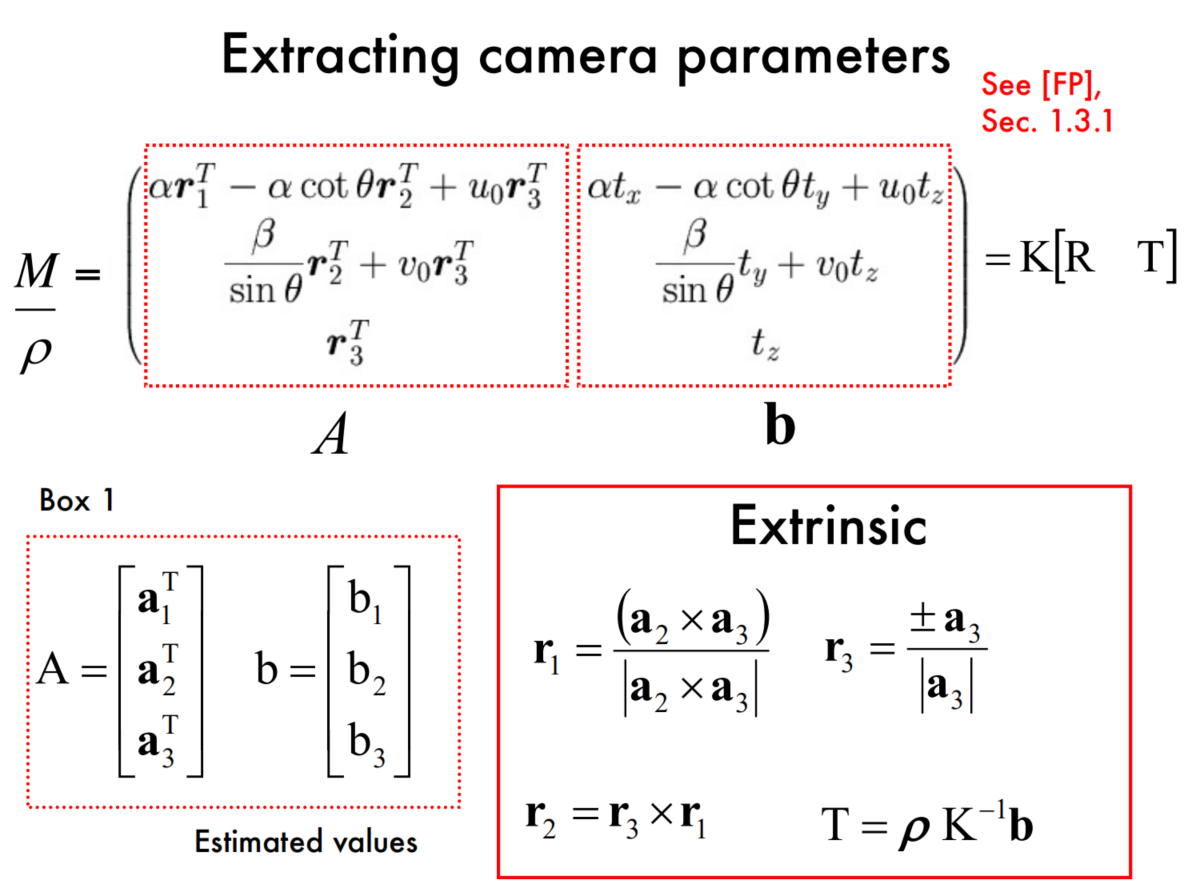
Extracting camera parameters
Degenerate cases
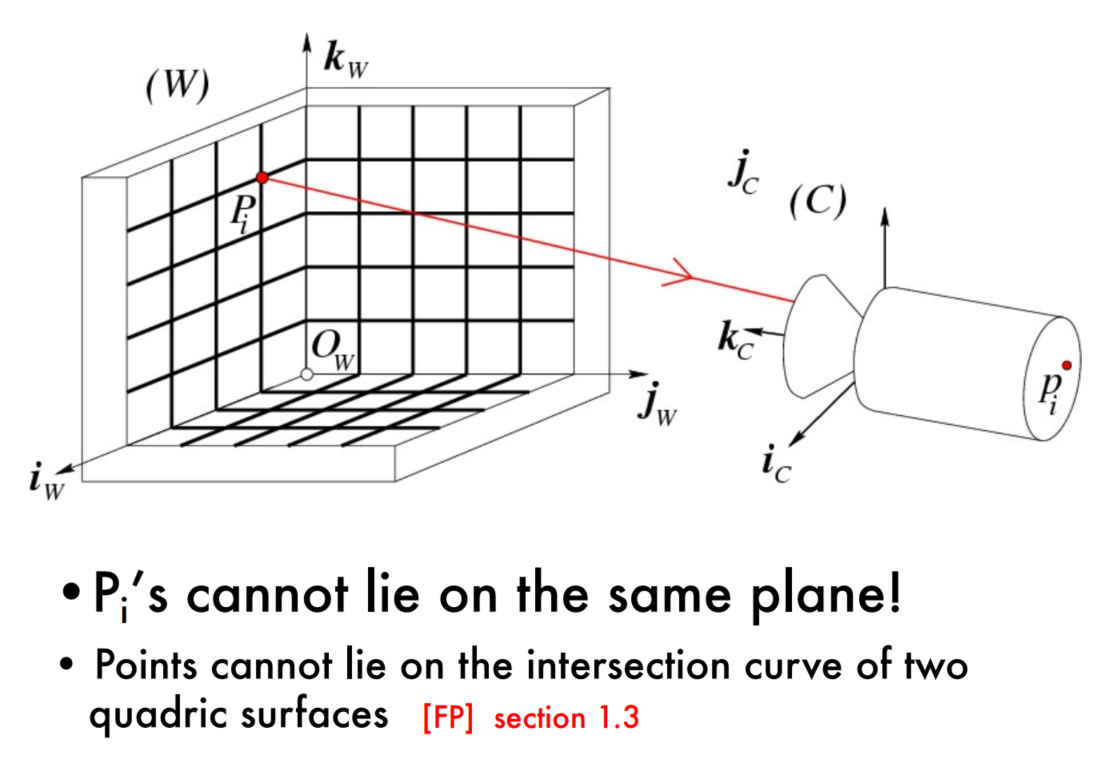
Question
Q:为什么标定相机使用的点不能够在同一个平面或者两个二次曲面的相交曲线上?
A:TODO
Q:常用的棋盘格标定法,使用的点应该是在同一个平面上的?它如何解决这个问题?
A:TODO
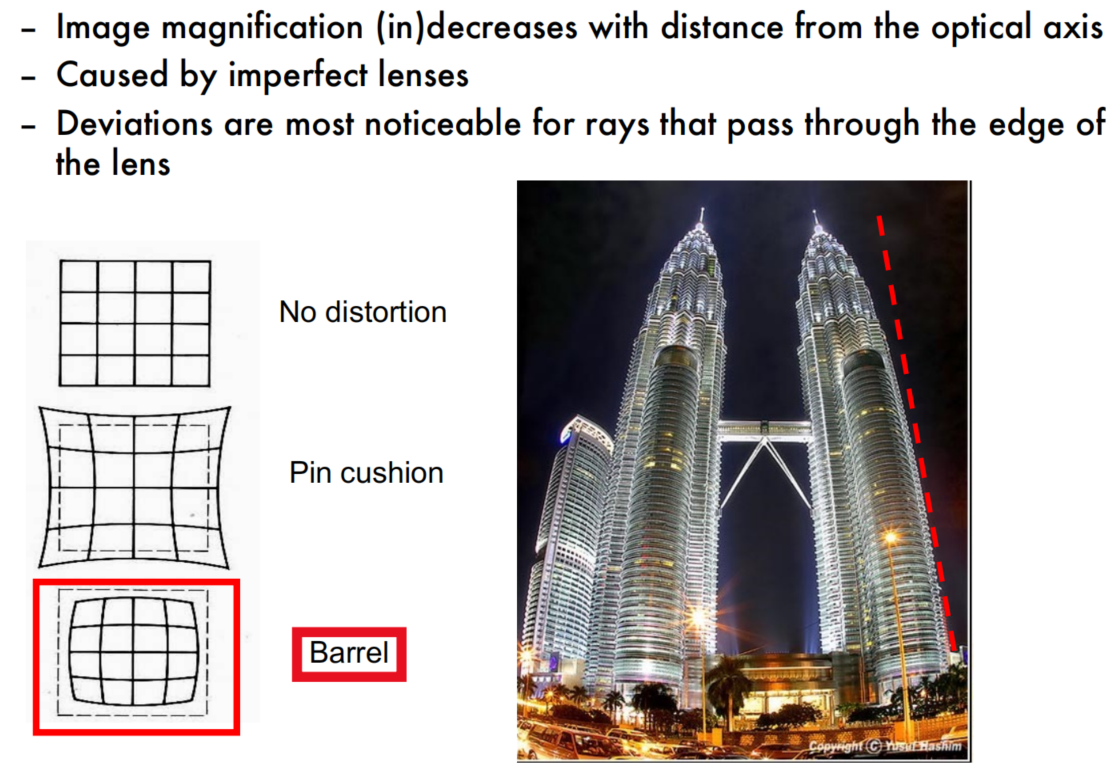
Camera calibration with radial distortion
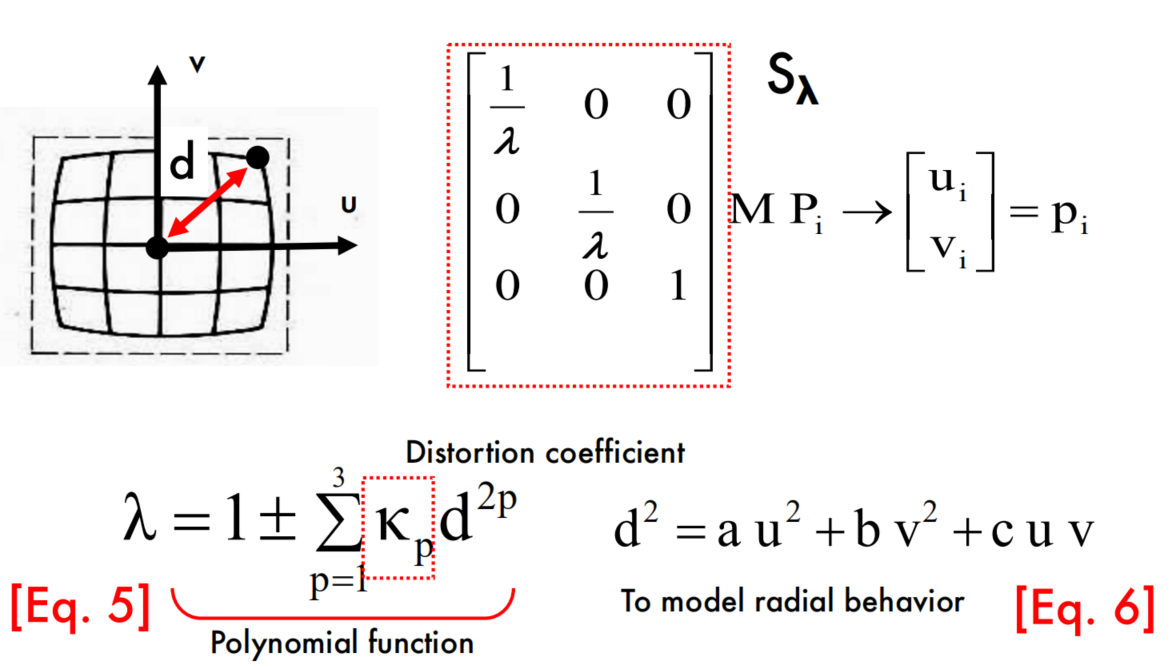
Review radial distortion
Calibration Problem
根据上一篇博客提到的径向畸变公式,给出下面的方程。
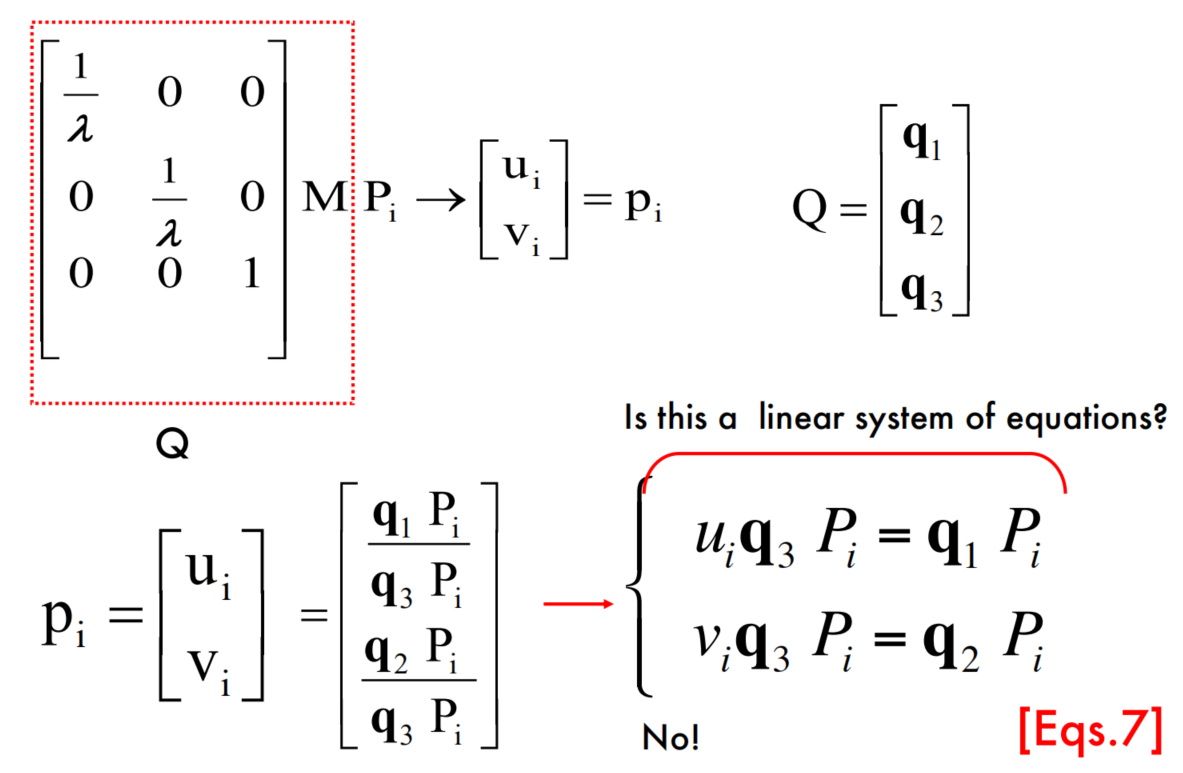
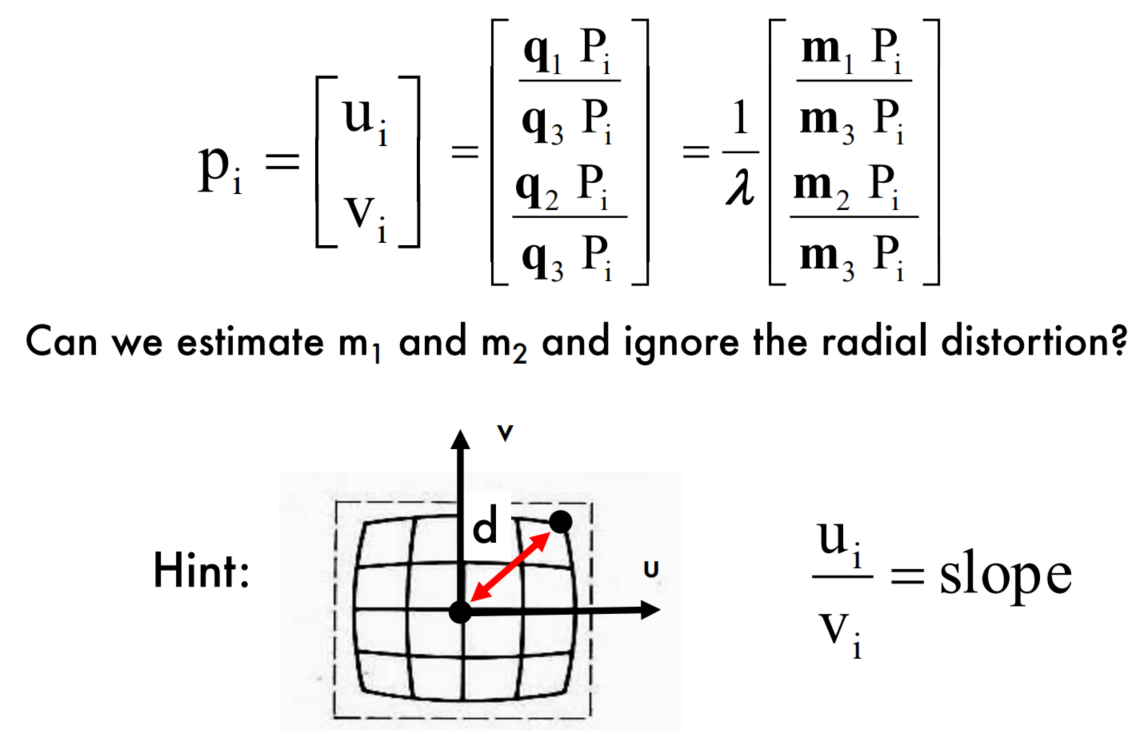
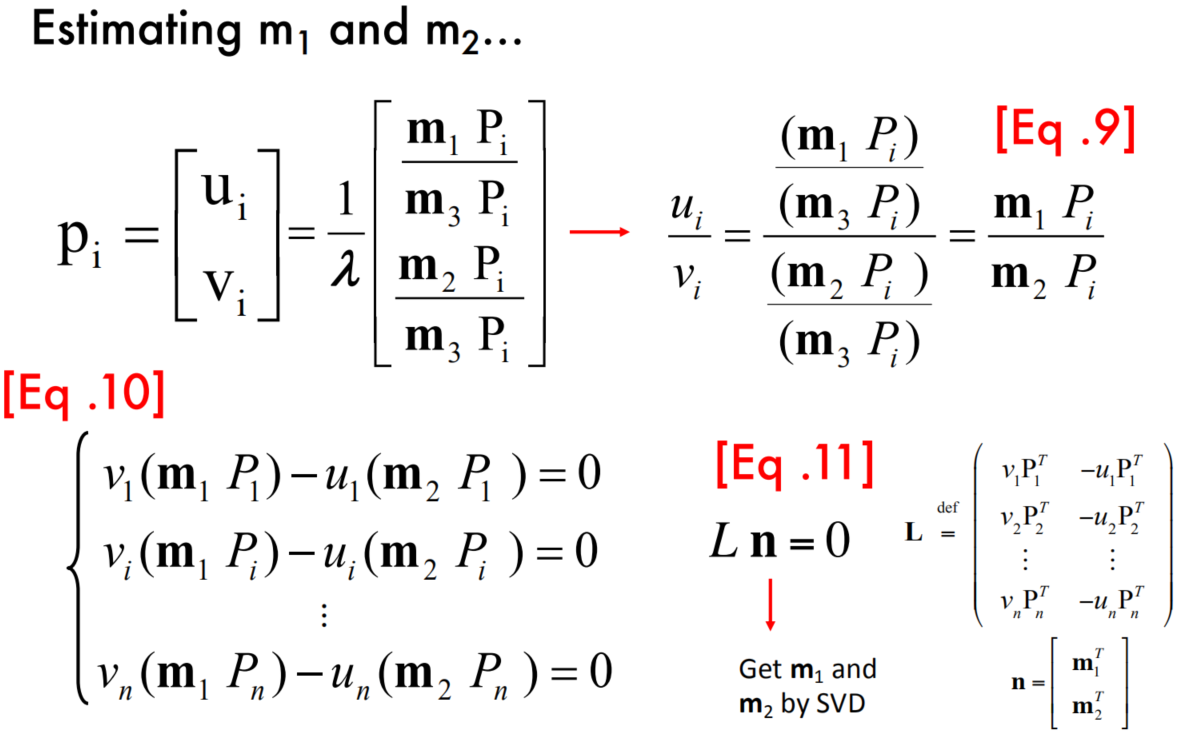
General Calibration Problem
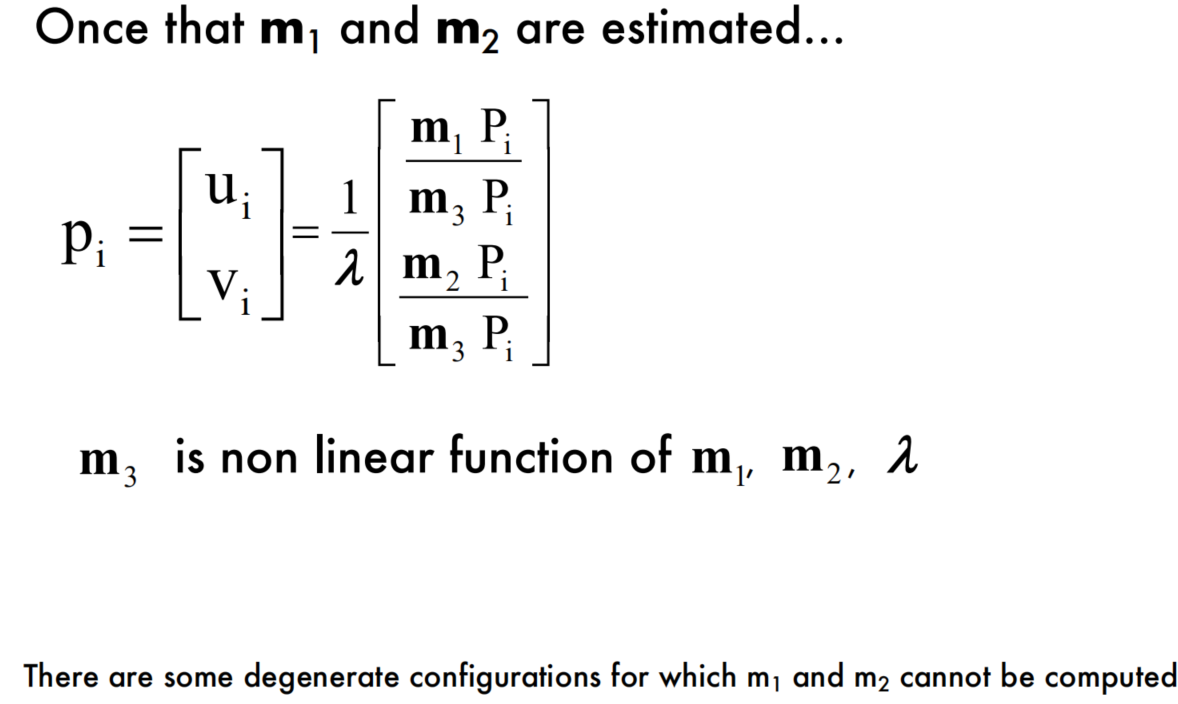
Estimate m1 and m2 and ignore the radial distortion
Question
Q:本课程只提到了在考虑径向畸变的情况下进行相机标定,如果把切向畸变也考虑进来,整个过程是什么样的?
A:TODO