三维视觉的神经隐式表示
Traditional 3D Reconstruction Pipeline
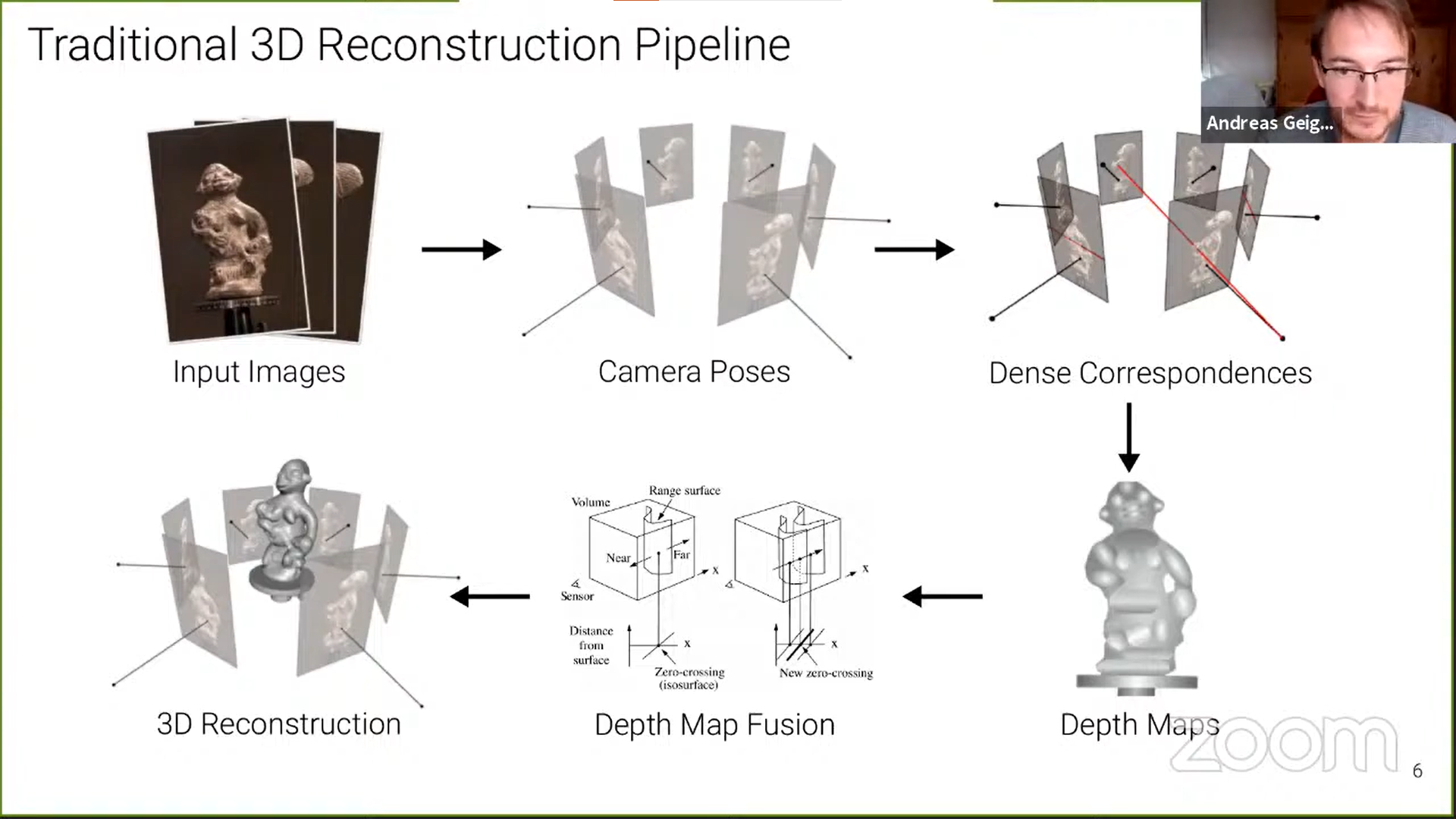
classical multi-view reconstruction:
- input a set of images
- estimate camera poses using bundle adjustment
- find dense correspondences
- create depth maps
- fuse these depth maps into a coherent reconstruction of the object or a bigger scene
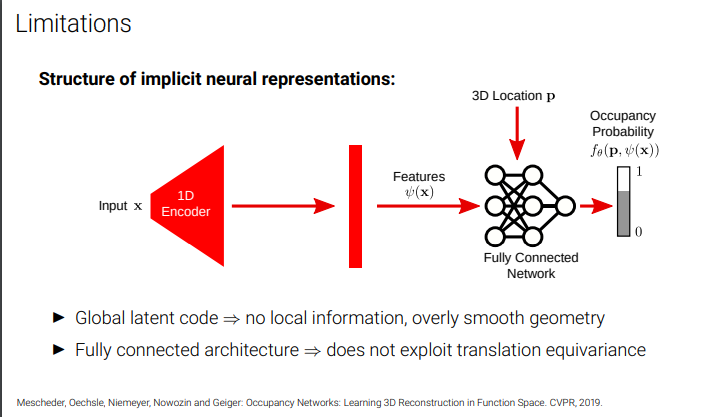
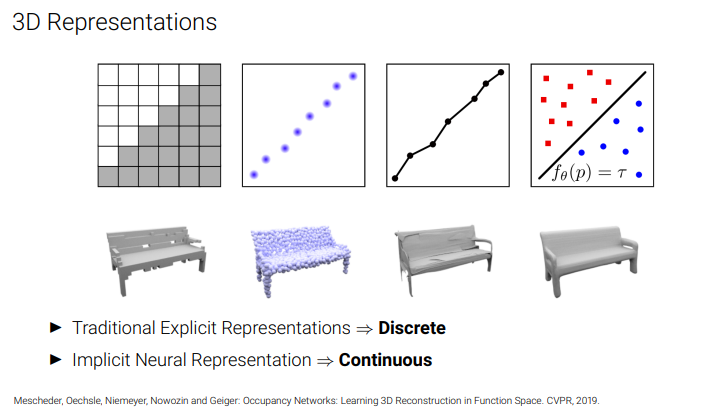
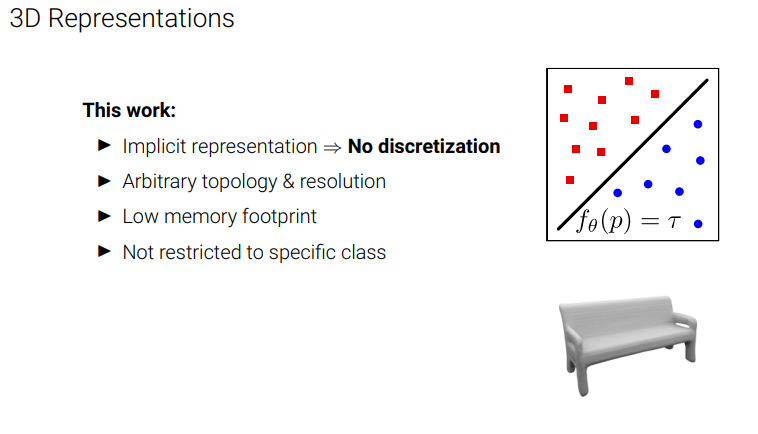
3D Representations
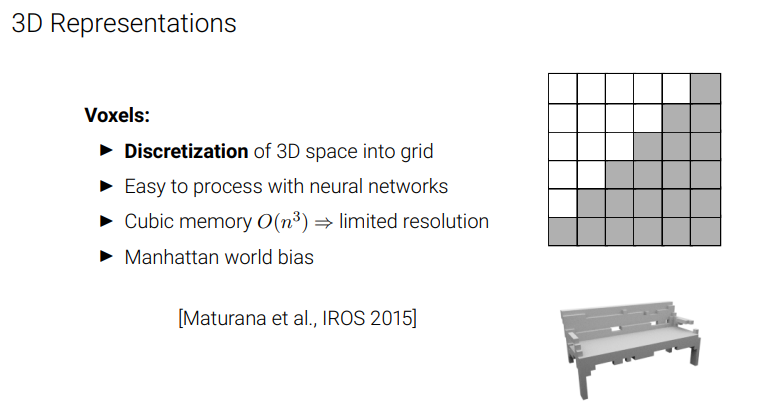
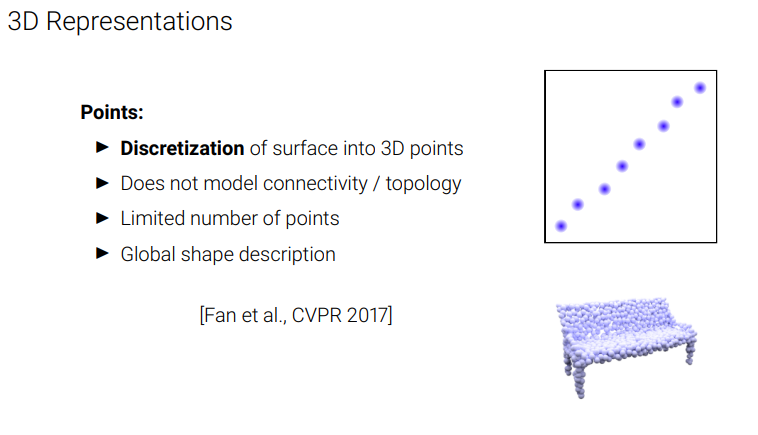
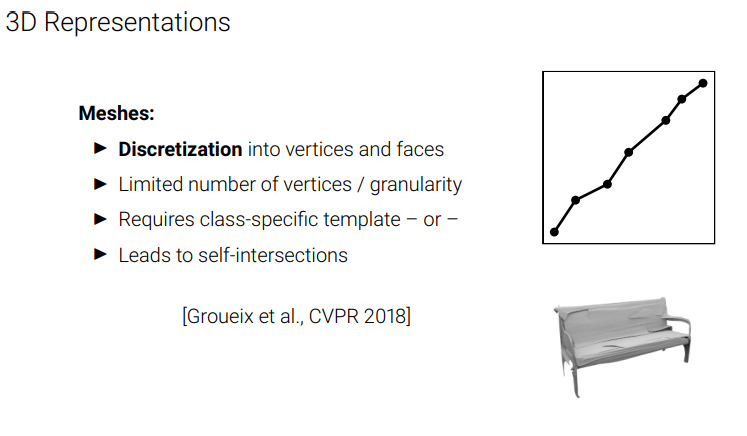
对3D物体表示方法有以下几种方式,分别是基于voxel(体素),基于Points(点云),基于mesh和基于volume的方法,其中前三种方法的问题是都是离散的,这就造成了它们都是不可微的;而最后的一种方法则是连续可微的方程。
基于voxel(体素)
基于Points(点云)
基于mesh
基于volume
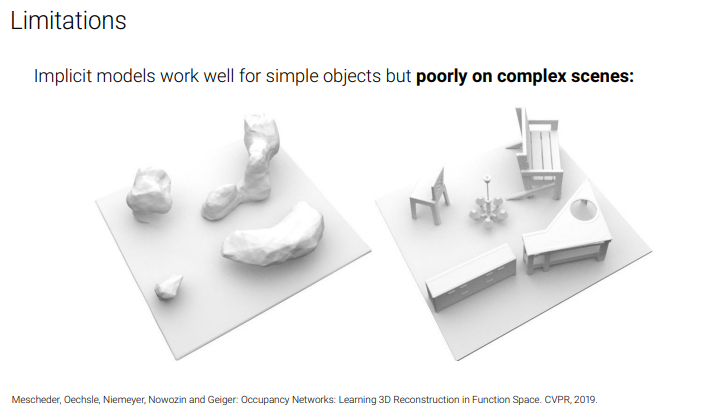
Limitations