PX4 Offboard Control Using MAVROS on Gazebo
最近在学习PX4和mavros,感觉px4官网的教程总体上讲得不错,但有一些地方不是很友好,比如offboard control这一块儿,讲的比较简单,省略了gazebo的使用,我上网查了一大堆资料才勉强把这个示例代码在gazebo中跑出来。所以这里做一个记录,希望对看到的人有点帮助。
安装MAVROS
介绍安装mavros的两种方式,建议参考:ROS with MAVROS Installation Guide。
方法一:二进制安装 (Debian / Ubuntu)
ROS 存储库包含适用于 Ubuntu x86、amd64 (x86_64) 和 armhf (ARMv7) 的二进制包。Kinetic 还支持 Debian Jessie amd64 和 arm64 (ARMv8)。
使用apt-get安装:
sudo apt-get install ros-melodic-mavros ros-melodic-mavros-extras然后安装GeographicLib通过运行install_geographiclib_datasets.sh脚本获取数据集:
wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh
sudo bash ./install_geographiclib_datasets.sh 方法二:源码安装
此安装假定您有一个 catkin 工作区位于~/catkin_ws如果您不使用以下内容创建一个:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws
catkin init
wstool init src您将使用 ROS Python 工具:wstool(用于检索源)、rosinstall和catkin_tools(构建)进行此安装。虽然它们可能是在您安装 ROS 期间安装的,但您也可以通过以下方式安装它们:
sudo apt-get install python-catkin-tools python-rosinstall-generator -y虽然可以使用catkin_make构建包,但首选方法是使用catkin_tools,因为它是一种更通用且“友好”的构建工具。
如果这是您第一次使用 wstool,则需要使用以下命令初始化源空间:
wstool init ~/catkin_ws/src现在您已准备好进行构建
安装 MAVLink;
# We use the Kinetic reference for all ROS distros as it's not distro-specific and up to date rosinstall_generator --rosdistro kinetic mavlink | tee /tmp/mavros.rosinstall使用已发布或最新版本从源代码安装 MAVROS;
发行版 / 稳定版
rosinstall_generator --upstream mavros | tee -a /tmp/mavros.rosinstall最新源码
rosinstall_generator --upstream-development mavros | tee -a /tmp/mavros.rosinstall# For fetching all the dependencies into your catkin_ws, # just add '--deps' to the above scripts, E.g.: # rosinstall_generator --upstream mavros --deps | tee -a /tmp/mavros.rosinstall
创建工作区 & 安装依赖;
wstool merge -t src /tmp/mavros.rosinstallwstool update -t src -j4rosdep install --from-paths src --ignore-src -y安装 GeographicLib数据集;
./src/mavros/mavros/scripts/install_geographiclib_datasets.sh构建;
catkin build确保您使用工作区中的 setup.bash 或 setup.zsh。
#Needed or rosrun can't find nodes from this workspace. source devel/setup.bash
出现错误的情况下,mavros repo还有额外的安装和故障排除说明。
构建offboard control示例程序
这里介绍构建官网示例代码的步骤,代码解读请参考:MAVROS Offboard control example
进入你的工作区并且创建一个包:
cd ~/catkin_ws/src
catkin_create_pkg offboard_pkg roscpp std_msgs geometry_msgs mavros_msgs在目录~/catkin_ws/src/offboard_pkg/src/中,新建一个文件offboard_node.cpp,写入如下的代码:
/**
* @file offb_node.cpp
* @brief Offboard control example node, written with MAVROS version 0.19.x, PX4 Pro Flight
* Stack and tested in Gazebo SITL
*/
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <mavros_msgs/State.h>
mavros_msgs::State current_state;
void state_cb(const mavros_msgs::State::ConstPtr& msg){
current_state = *msg;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "offb_node");
ros::NodeHandle nh;
ros::Subscriber state_sub = nh.subscribe<mavros_msgs::State>
("mavros/state", 10, state_cb);
ros::Publisher local_pos_pub = nh.advertise<geometry_msgs::PoseStamped>
("mavros/setpoint_position/local", 10);
ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool>
("mavros/cmd/arming");
ros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>
("mavros/set_mode");
//the setpoint publishing rate MUST be faster than 2Hz
ros::Rate rate(20.0);
// wait for FCU connection
while(ros::ok() && !current_state.connected){
ros::spinOnce();
rate.sleep();
}
geometry_msgs::PoseStamped pose;
pose.pose.position.x = 0;
pose.pose.position.y = 0;
pose.pose.position.z = 2;
//send a few setpoints before starting
for(int i = 100; ros::ok() && i > 0; --i){
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
mavros_msgs::SetMode offb_set_mode;
offb_set_mode.request.custom_mode = "OFFBOARD";
mavros_msgs::CommandBool arm_cmd;
arm_cmd.request.value = true;
ros::Time last_request = ros::Time::now();
while(ros::ok()){
if( current_state.mode != "OFFBOARD" &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( set_mode_client.call(offb_set_mode) &&
offb_set_mode.response.mode_sent){
ROS_INFO("Offboard enabled");
}
last_request = ros::Time::now();
} else {
if( !current_state.armed &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( arming_client.call(arm_cmd) &&
arm_cmd.response.success){
ROS_INFO("Vehicle armed");
}
last_request = ros::Time::now();
}
}
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
return 0;
}然后打开目录~/catkin_ws/src/offboard_pkg/下的CMakeLists.txt添加下面的两行:
add_executable(offboard_node src/offboard_node.cpp)
target_link_libraries(offboard_node ${catkin_LIBRARIES})然后到目录~/catkin_ws下,运行命令,完成编译:
catkin_make之后你可以在~.bashrc或者~.zshrc中写入source该工作空间的指令,如果出现了工作空间覆盖的问题,可以参考我的另外一篇博客解决source多个ROS工作空间时的覆盖问题。
安装PX4-Autopilot
网上有一些教程讲的是Firmware,但两个应该都是一样的。
下载PX4-Autopilot
git clone https://github.com/PX4/PX4-Autopilot.git
cd PX4-Autopilot
git checkout v1.12.0编译PX4-Autopilot
make distclean
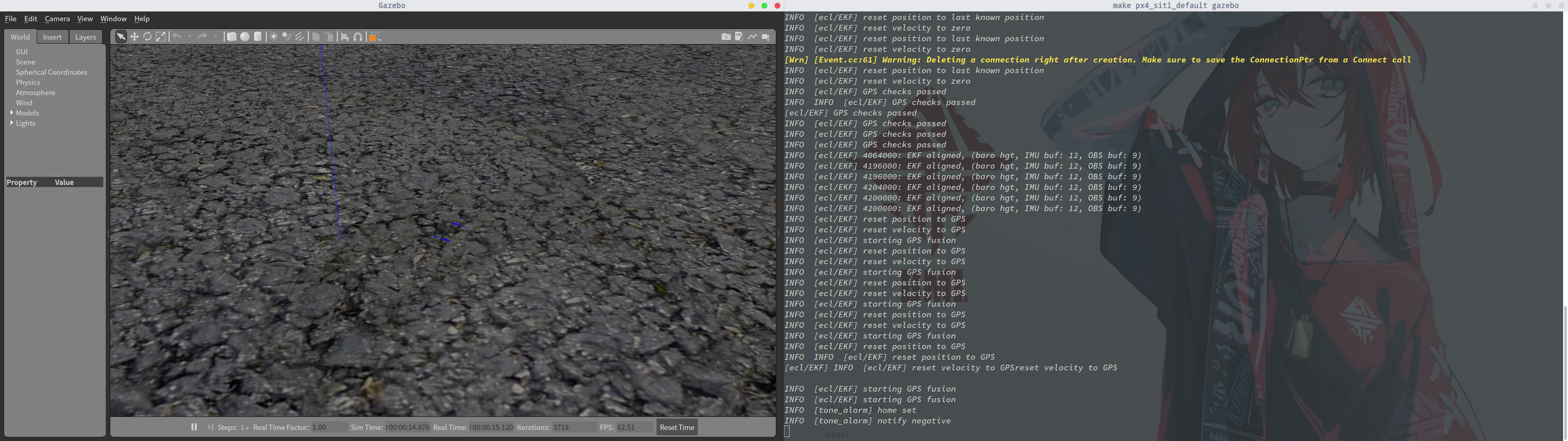
make px4_sitl_default gazebo请确保make px4_sitl_default gazebo命令执行成功,如有报错信息,根据报错信息来进行修复即可。
在这条指令运行成功之后,gazebo会打开,你会看到如下的界面:
修改~.bashrc或者~.zshrc(optional)
这一步不影响我们在gazebo中运行Offboard Control示例程序,但还是建议修改一下。
source ~/PX4-Autopilot/Tools/setup_gazebo.bash ~/PX4-Autopilot ~/PX4-Autopilot/build/px4_sitl_defaultexport
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4-Autopilotexport
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4-Autopilot/Tools/sitl_gazebo在Gazebo中运行Offboard Control示例程序
启动Gazebo
像之前一样,进入到PX4-Autopilot的目录中,运行如下指令打开Gazebo:
make px4_sitl_default gazebo运行MAVROS
mavlink会开放14557, 接到这个端口将会接收到实际飞行中发出的所有数据。
若要连接到一个特定的IP(fcu_url是SITL的IP/端口),请使用一个如下形式的URL:
roslaunch mavros px4.launch fcu_url:="udp://:14540@192.168.1.36:14557"连接本地:
roslaunch mavros px4.launch fcu_url:="udp://:14540@127.0.0.1:14557"这里我们在自己的电脑上运行,因此使用连接本地的指令即可。
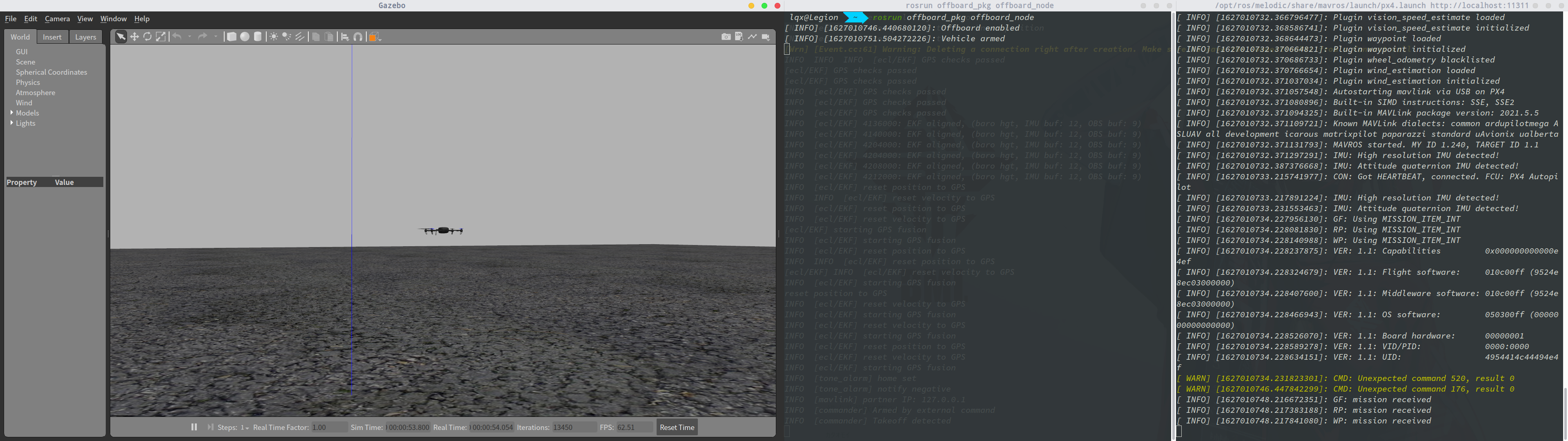
运行offboard_node
rosrun offboard_pkg offboard_node最终的效果应该如下图所示,gazebo中的无人机起飞并且悬停在了空中。