SLAM问题的数学表述
本文是作者对于SLAM问题数学表述的一些理解,如有错误,非常非常非常欢迎指正!
经典SLAM模型
经典SLAM模型由一个运动方程和一个观测方程构成,如下所示:
$$
\begin{cases}
x_k &= \ f(x_{k-1},u_k,w_k) \\
z_{k,j} &= \ h(y_j,x_k,v_{k,j})
\end{cases}
$$
有时候也会写成下面这样的形式:
$$
\begin{cases}
x_k &= \ f(x_{k-1},u_k) +w_k \\
z_{k,j} &= \ h(y_j,x_k)+v_{k,j}
\end{cases}
$$
这两种形式本质上都是一样的。其中,$ x_k $表示第k次的位置或者位姿,$ u_k $表示第k次传感器的读数或者输入,$ w_k $表示第k次运动过程中的噪声;而$ y_j $为观测到的路标点j,$ z_{k,j} $则表示第k次观测中对于路标点j所得到的观测结果,$ v_{k,j} $为本次观测过程中的噪声。而上面的函数 $ f $ 和 $ h $ ,需要根据具体的情况来确定。
之后,我们将以视觉SLAM为例来更深入的理解SLAM的数学表述。
针孔相机模型
考虑到视觉SLAM的传感器是相机,并且通常符合针孔相机模型。所以在继续探讨之前,我们将对针孔相机模型做一个简单的介绍。
从相机坐标系到图像坐标系
如下图,相机坐标系下的一点$ P(X, Y, Z) $,通过小孔成像在相机的物理成像平面上,记为$ P’(X’, Y’) $。
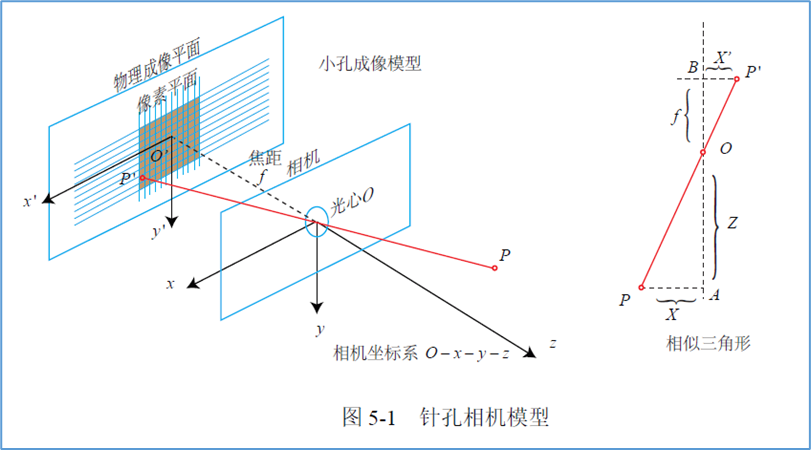
我们能够很容易的得出以下结论:
$$
\frac Zf=- \frac X{X’}=- \frac Y{Y’}
$$
由于我们通常看到的像都是正的,并且为了公式的简洁,我们对上式加以整理,得到:
$$
X’=f \frac XZ \\
Y’=f \frac YZ
$$
从图像坐标系到像素坐标系
事实上,计算机看到的图像都是由像素构成的,从图像坐标系到像素坐标系还需要经过一次转化。这里我们记像素坐标为$ P’’(u,v) $。
$$
\begin{cases}
u=\alpha X’+c_x \\
v=\beta Y’+c_y
\end{cases}
$$
其中$ \alpha $和$ \beta $分别表示x轴和y轴的缩放系数,而$ c_x $和$ c_y $则表示平移量。
我们将之前得到的结论代入上式,可以得到:
$$
\begin{cases}
u=f_x\frac XZ+c_x \\
v=f_y\frac YZ+c_y
\end{cases}
$$
其矩阵形式可以表示为:
$$
\begin{pmatrix} u\\v\\1 \end{pmatrix}=\frac1Z\begin{pmatrix}f_x & 0 & c_x \\ 0 & f_y & c_y\\0 & 0 & 1 \end{pmatrix}
\begin{pmatrix}X\\Y\\Z\end{pmatrix}
\overset{\text{def}}{=}\frac 1ZKP
$$
但我们通常使用下面的公式来表示,它看上去更简洁:
$$
Z\begin{pmatrix} u\\v\\1 \end{pmatrix}=\begin{pmatrix}f_x & 0 & c_x \\ 0 & f_y & c_y\\0 & 0 & 1 \end{pmatrix}
\begin{pmatrix}X\\Y\\Z\end{pmatrix}
\overset{\text{def}}{=}KP
$$
左边的是齐次坐标,而右边的是非齐次坐标。我们把中间的矩阵称为内参数,记为K,内参通常在相机生产之后就已经固定,我们可以通过查询或者标定获得相机的内参。
从世界坐标系到相机坐标系
上面我们仅仅描述了物体从相机坐标系到像素坐标系的转化。而在SLAM中,我们通常需要设置一个世界坐标系以描述相机或机器人的位置信息。因此从物体被观测,再到获得观测结果,即物体的像素坐标,中间还有一个转化过程。我们使用如下的一个式子进行描述:
$$
ZP_{uv}=Z\begin{pmatrix} u\\v\\1 \end{pmatrix}=KP=K(RP_w+t)=KTP_w
$$
这里,$ R $是旋转矩阵,$ t $是平移矩阵,$ T= \begin{pmatrix} R & t \\ 0 & 1 \end{pmatrix} $。可以理解为使用世界坐标系描述的点$ P_w $经过旋转变化和平移变化,得到了使用相机坐标系描述的点$ P $。
其中R,t 或T被称为外参,而外参正是SLAM估计的目标。
更具体的数学表述
再回到最开始提到的运动方程和观测方程:
$$
\begin{cases}
x_k &= \ f(x_{k-1},u_k) +w_k \\
z_{k,j} &= \ h(y_j,x_k)+v_{k,j}
\end{cases}
$$
我们知道机器人有六个自由度,因此我们可以把$ x_k $理解为第k次观测时机器人的位姿,它是六维的,我们可以用向量表示,也可以使用变换矩阵表示,即上面的$ T $(可以认为当前机器人的位姿是由机器人在原点经过$ R $旋转和$ t $平移得到的)。此时运动方程描述的是机器人在第k-1次观测后,对其传感器输入$ u_k $,使机器人的位姿从$ x_{k-1} $变换到了$ x_k $,而$ w_k $则是此次运动中的噪声。
而我们上面讲的针孔相机模型,实际上就是视觉SLAM中的观测模型。公式中$ y_j $就是针孔相机模型中我们观测的点$ P_w $,表示世界坐标系下路标点j的坐标,而$ z_{k,j} $就是观测的最终结果——像素坐标$ P_{uv} $。$ x_k $既是机器人的位姿,实际上也是模型中的外参$ T $。$ v_{k,j} $则是此次观测中的噪声。
至此,我们可以用一种更具体的形式重写上面的运动方程和观测方程:
$$
\begin{cases}
T_k &= \ f(T_{k-1},u_k) +w_k \\
s_j P_{uv(k,j)} &= \ K(R_kP_{w(j)}+t_k)+v_{k,j}=KT_kP_{w(j)}+v_{k,j}
\end{cases}
$$
其中$ s_j $是路标点j到相机光心的距离。
对SLAM问题的总结
通常,由于各种复杂因素的影响,我们无法直接求解机器人实际的运动方程,也无法通过理论上的运动方程精确计算出机器人的位姿,因此我们通过求解观测方程来相对精确地计算机器人的位置信息。
在视觉SLAM中,这个过程可以表述为:已知相机内参$ K $,相机观测到的目标物坐标$ P_w $,目标物距离相机的距离$ s $以及它在图像上的像素坐标$ P_{uv} $,求解机器人的位姿$ T $。
当然,由于观测数据同样受噪声影响,最终得到的位姿也不是准确的,还需要通过一些处理来减小误差。