使用kalibr进行Camera-IMU联合标定
本文以Intel RealSense D435i为例,介绍使用kalibr进行Camera-IMU联合标定的方法。
整个过程比较复杂,需要花费的时间比较多,进行的准备工作也比较多。具体分为三步,即首先使用imu_utils标定IMU,然后再通过kalibr标定相机,最后结合前面两步标定的结果用kalibr进行Camera-IMU联合标定。
准备工作
软件方面:
- Linux系统,例如Ubuntu 18.04
- ROS环境,例如ROS Melodic
- RealSense SDK 与 realsense-ros-wrapper
- kalibr
- code_utils 与 imu_utils
- 其他相关依赖
硬件方面:
- Intel Realsense D435i相机
- 标定板一个,例如打印好的AprilTag或棋盘格
注:
使用kalibr生成标定板的命令格式如下,运行后可以得到一个pdf文件。需要使用原始尺寸打印出来,并且这里的参数要记好,后面需要用。
kalibr_create_target_pdf --type apriltag --nx [NUM_COLS] --ny [NUM_ROWS] --tsize [TAG_WIDTH_M] --tspace [TAG_SPACING_PERCENT]在开始下面的工作之前,你需要先做好这个部分的准备工作。标定板可以用纸张打印后平贴到墙壁上,相关软件、依赖参考官网的教程即可顺利完成,这里不再赘述。
使用imu_utils标定imu
1.运行D435i相机
你可以通过下面的方式指定参数来运行:
roslaunch realsense2_camera rs_camera.launch \
unite_imu_method:="linear_interpolation" \
enable_gyro:=true \
enable_accel:=true当然,也可以修改rs_camera.launch这个文件里面的内容,把上面对应的部分修改好即可。然后直接运行:
roslaunch realsense2_camera rs_camera.launch2.录制IMU数据包
在相机运行起来后,imu数据会在/camera/imu话题下发布,录制这个话题的信息即可,建议录制比较长的时间。
rosbag record -O imu_calibration /camera/imu 3.使用imu_utils进行标定
首先需要新建一个imu_utils的launch文件,内容如下所示:
<launch>
<node pkg="imu_utils" type="imu_an" name="imu_an" output="screen">
<!--IMU的话题-->
<param name="imu_topic" type="string" value= "/camera/imu"/>
<!--这个和最后保存的文件名有关,最后的文件名为D435i_imu_param.yaml-->
<param name="imu_name" type="string" value= "D435i"/>
<!--标定结果存放的文件目录-->
<param name="data_save_path" type="string" value= "$(find imu_utils)/data/"/>
<!--修改标定时间,单位是分钟,需要根据数据包的时长来调整-->
<param name="max_time_min" type="int" value= "10"/>
<param name="max_cluster" type="int" value= "100"/>
</node>
</launch>我们把新建的launch文件命名为d435i_imu_calibration.launch ,然后通过如下的命令就可以运行了:
roslaunch imu_utils d435i_imu_calibration.launch 运行之后imu_utils会等待imu数据的发布,因此我们还需要播放之前录制的数据包。找到之前录制的数据包,运行下面的命令:
rosbag play -r 200 imu_calibration.bag-r 200是以200倍的速度播放这个数据包。
这一部分的工作都完成之后,我们会得到D435i相机IMU的标定文件D435i_imu_param.yaml。
使用kalibr标定Camera
1.确认标定板的参数
这里我使用kalibr生成的标定板,生成的命令如下所示:
kalibr_create_target_pdf --type apriltag --nx 6 --ny 6 --tsize 0.03 --tspace 0.3将上面命令中对应的参数保存到april_s.yaml文件中,之后我们还需要用到。文件内容如下所示:
target_type: 'aprilgrid' #gridtype
tagCols: 6 #number of apriltags
tagRows: 6 #number of apriltags
tagSize: 0.03 #size of apriltag, edge to edge [m]
tagSpacing: 0.3 #ratio of space between tags to tagSize2.修改D435i的launch文件
由于需要标定的是D435i的两个红外摄像头,因此我们要在launch文件中开启D435i的红外摄像头,同时关掉D435i的激光,防止产生干扰。对应的launch文件保存为rs_d435i.launch,具体内容如下所示,可直接使用:
<launch>
<arg name="emitter_enable" default="0"/>
<arg name="serial_no" default=""/>
<arg name="usb_port_id" default=""/>
<arg name="device_type" default=""/>
<arg name="json_file_path" default=""/>
<arg name="camera" default="camera"/>
<arg name="tf_prefix" default="$(arg camera)"/>
<arg name="external_manager" default="false"/>
<arg name="manager" default="realsense2_camera_manager"/>
<arg name="output" default="screen"/>
<arg name="respawn" default="false"/>
<arg name="fisheye_width" default="-1"/>
<arg name="fisheye_height" default="-1"/>
<arg name="enable_fisheye" default="false"/>
<arg name="depth_width" default="640"/>
<arg name="depth_height" default="480"/>
<arg name="enable_depth" default="true"/>
<arg name="confidence_width" default="-1"/>
<arg name="confidence_height" default="-1"/>
<arg name="enable_confidence" default="true"/>
<arg name="confidence_fps" default="-1"/>
<arg name="infra_width" default="640"/>
<arg name="infra_height" default="480"/>
<arg name="enable_infra" default="true"/>
<arg name="enable_infra1" default="true"/>
<arg name="enable_infra2" default="true"/>
<arg name="infra_rgb" default="false"/>
<arg name="color_width" default="640"/>
<arg name="color_height" default="480"/>
<arg name="enable_color" default="true"/>
<arg name="fisheye_fps" default="30"/>
<arg name="depth_fps" default="30"/>
<arg name="infra_fps" default="30"/>
<arg name="color_fps" default="30"/>
<arg name="gyro_fps" default="200"/>
<arg name="accel_fps" default="250"/>
<arg name="enable_gyro" default="true"/>
<arg name="enable_accel" default="true"/>
<arg name="enable_pointcloud" default="false"/>
<arg name="pointcloud_texture_stream" default="RS2_STREAM_COLOR"/>
<arg name="pointcloud_texture_index" default="0"/>
<arg name="allow_no_texture_points" default="false"/>
<arg name="ordered_pc" default="false"/>
<arg name="enable_sync" default="true"/>
<arg name="align_depth" default="true"/>
<arg name="publish_tf" default="true"/>
<arg name="tf_publish_rate" default="0"/>
<arg name="filters" default=""/>
<arg name="clip_distance" default="-2"/>
<arg name="linear_accel_cov" default="0.01"/>
<arg name="initial_reset" default="false"/>
<arg name="unite_imu_method" default="linear_interpolation"/>
<arg name="topic_odom_in" default="odom_in"/>
<arg name="calib_odom_file" default=""/>
<arg name="publish_odom_tf" default="true"/>
<arg name="stereo_module/exposure/1" default="7500"/>
<arg name="stereo_module/gain/1" default="16"/>
<arg name="stereo_module/exposure/2" default="1"/>
<arg name="stereo_module/gain/2" default="16"/>
<group ns="$(arg camera)">
<!-- rosparam set stereo_module/emitter_enabled false -->
<rosparam>
stereo_module/emitter_enabled: 0
</rosparam>
<rosparam if="$(arg emitter_enable)">
stereo_module/emitter_enabled: 1
</rosparam>
<include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml">
<arg name="tf_prefix" value="$(arg tf_prefix)"/>
<arg name="external_manager" value="$(arg external_manager)"/>
<arg name="manager" value="$(arg manager)"/>
<arg name="output" value="$(arg output)"/>
<arg name="respawn" value="$(arg respawn)"/>
<arg name="serial_no" value="$(arg serial_no)"/>
<arg name="usb_port_id" value="$(arg usb_port_id)"/>
<arg name="device_type" value="$(arg device_type)"/>
<arg name="json_file_path" value="$(arg json_file_path)"/>
<arg name="enable_pointcloud" value="$(arg enable_pointcloud)"/>
<arg name="pointcloud_texture_stream" value="$(arg pointcloud_texture_stream)"/>
<arg name="pointcloud_texture_index" value="$(arg pointcloud_texture_index)"/>
<arg name="enable_sync" value="$(arg enable_sync)"/>
<arg name="align_depth" value="$(arg align_depth)"/>
<arg name="fisheye_width" value="$(arg fisheye_width)"/>
<arg name="fisheye_height" value="$(arg fisheye_height)"/>
<arg name="enable_fisheye" value="$(arg enable_fisheye)"/>
<arg name="depth_width" value="$(arg depth_width)"/>
<arg name="depth_height" value="$(arg depth_height)"/>
<arg name="enable_depth" value="$(arg enable_depth)"/>
<arg name="confidence_width" value="$(arg confidence_width)"/>
<arg name="confidence_height" value="$(arg confidence_height)"/>
<arg name="enable_confidence" value="$(arg enable_confidence)"/>
<arg name="confidence_fps" value="$(arg confidence_fps)"/>
<arg name="color_width" value="$(arg color_width)"/>
<arg name="color_height" value="$(arg color_height)"/>
<arg name="enable_color" value="$(arg enable_color)"/>
<arg name="infra_width" value="$(arg infra_width)"/>
<arg name="infra_height" value="$(arg infra_height)"/>
<arg name="enable_infra" value="$(arg enable_infra)"/>
<arg name="enable_infra1" value="$(arg enable_infra1)"/>
<arg name="enable_infra2" value="$(arg enable_infra2)"/>
<arg name="infra_rgb" value="$(arg infra_rgb)"/>
<arg name="fisheye_fps" value="$(arg fisheye_fps)"/>
<arg name="depth_fps" value="$(arg depth_fps)"/>
<arg name="infra_fps" value="$(arg infra_fps)"/>
<arg name="color_fps" value="$(arg color_fps)"/>
<arg name="gyro_fps" value="$(arg gyro_fps)"/>
<arg name="accel_fps" value="$(arg accel_fps)"/>
<arg name="enable_gyro" value="$(arg enable_gyro)"/>
<arg name="enable_accel" value="$(arg enable_accel)"/>
<arg name="publish_tf" value="$(arg publish_tf)"/>
<arg name="tf_publish_rate" value="$(arg tf_publish_rate)"/>
<arg name="filters" value="$(arg filters)"/>
<arg name="clip_distance" value="$(arg clip_distance)"/>
<arg name="linear_accel_cov" value="$(arg linear_accel_cov)"/>
<arg name="initial_reset" value="$(arg initial_reset)"/>
<arg name="unite_imu_method" value="$(arg unite_imu_method)"/>
<arg name="topic_odom_in" value="$(arg topic_odom_in)"/>
<arg name="calib_odom_file" value="$(arg calib_odom_file)"/>
<arg name="publish_odom_tf" value="$(arg publish_odom_tf)"/>
<arg name="stereo_module/exposure/1" value="$(arg stereo_module/exposure/1)"/>
<arg name="stereo_module/gain/1" value="$(arg stereo_module/gain/1)"/>
<arg name="stereo_module/exposure/2" value="$(arg stereo_module/exposure/2)"/>
<arg name="stereo_module/gain/2" value="$(arg stereo_module/gain/2)"/>
<arg name="allow_no_texture_points" value="$(arg allow_no_texture_points)"/>
<arg name="ordered_pc" value="$(arg ordered_pc)"/>
</include>
</group>
</launch>3.录制Camera数据包
a) 启动RealSense的Camera节点
终端运行roslaunch realsense2_camera rs_d435i.launch,即运行我们上面编辑的launch文件,启动RealSense的Camera节点。
b) 可视化相机影像
方便起见,我们需要可视化相机影像,可以利用rqt_image_view工具来查看影像流,终端运行rosrun rqt_image_view rqt_image_view或者rqt_image_view即可。
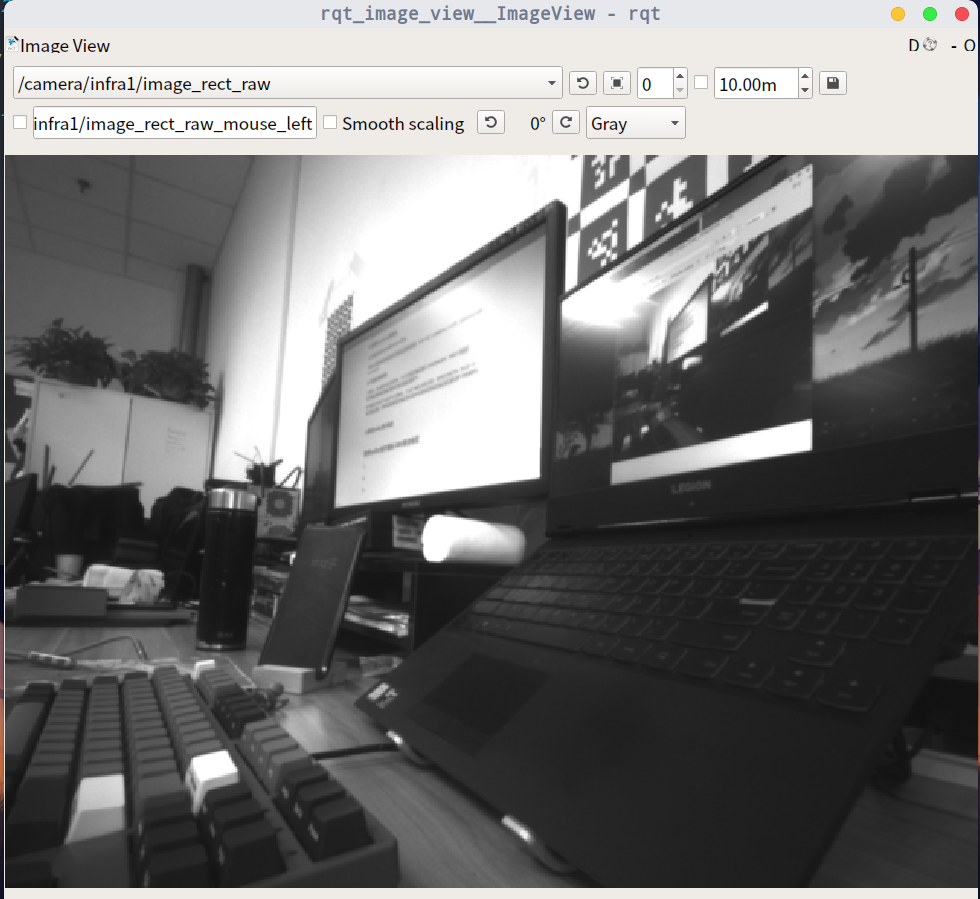
我们需要标定的是D435i的两个红外摄像头,不过两个摄像头距离比较近,看到的东西差不多。所以开一个rqt_image_view,查看/camera/infra1/image_rect_raw或者/camera/infra2/image_rect_raw话题下的影像即可。
效果如下图所示:
c) 影像Topic重新发布
然后需要做的是,将传感器的Topic发送速率“转换”一下,因为在Kalibr的官方文档中,对于相机标定,推荐的速率是每秒4帧左右(FPS=4),而D435i默认是30帧每秒,所以需要转换一下,不然标定时间会非常漫长。
转换使用ROS自带的topic_tools即可。新打开两个终端,分别在其中输入rosrun topic_tools throttle messages /camera/infra1/image_rect_raw 4.0 /infra1_image_rect_raw和rosrun topic_tools throttle messages /camera/infra2/image_rect_raw 4.0 /infra2_image_rect_raw即可。
这会将/camera/infra1/image_rect_raw和/camera/infra2/image_rect_raw的数据重新以4.0的频率在/infra1_image_rect_raw和/infra2_image_rect_raw下发布。
d) 录制Camera数据包
确认前几步都做好后,我们将标定板固定在某处,让相机对着标定板运动。
运动的方式为:先绕相机的各自三个轴,每个轴旋转三次,然后再沿着相机的三个轴,每个轴平移三次,基本就可以了,运动期间要保证相机基本能一直看到标定板的全部信息。
不过因为这是标定Camera,所以也可以将打印出来的标定板拿好,然后在相机前面来回运动,但因为笔者是用纸张打印的标定板,所以没采用这种方式。
通过如下命令录制camera数据包:
rosbag record -O camera_calibration /infra1_image_rect_raw /infra2_image_rect_raw4.使用Kalibr进行标定
通过如下的命令运行kalibr进行标定:
kalibr_calibrate_cameras --target ./yaml/april_s.yaml --bag ./rosbag/camera_calibration.bag --bag-from-to 30 90 --models pinhole-radtan pinhole-radtan --topics /infra1_image_rect_raw /infra2_image_rect_raw--target:标定板参数信息存放的路径,即我们上面的april_s.yaml的路径。
--bag:录制的Camera数据包的路径。
--bag-from-to:起始和终止时间,单位是秒。为了避免开始录制和结束录制时的抖动,这里取了第30秒到第90秒之间的信息。
models:相机模型,一般为针孔模型,即pinhole-radtan。注意后面有几个话题前面就要写几次模型。
--topics:影像流发布的话题。
等待一段比较长的时间后会得到标定结果。
使用kalibr进行Camera-IMU联合标定
有了前几步的铺垫和积累,这里需要进行的工作并不是很多。
1.录制Camera-IMU数据包
a) 启动RealSense的Camera节点
终端运行roslaunch realsense2_camera rs_d435i.launch,即运行我们之前编辑的launch文件,启动RealSense的Camera节点。
b) 可视化相机影像
和标定Camera时一样,利用rqt_image_view工具来查看影像流,终端运行rosrun rqt_image_view rqt_image_view或者rqt_image_view即可。
我们需要标定的是D435i的两个红外摄像头,开一个rqt_image_view,查看/camera/infra1/image_rect_raw或者/camera/infra2/image_rect_raw话题下的影像即可。
c) 影像Topic重新发布
这里也与前面类似,但是对于相机-IMU标定,官方文档给出的建议帧率是:Camera 20FPS,IMU 200FPS。
转换依然使用ROS自带的topic_tools即可,新打开三个终端,分别在其中输入:
rosrun topic_tools throttle messages /camera/infra1/image_rect_raw 4.0 /infra1_image_rect_raw
rosrun topic_tools throttle messages /camera/infra2/image_rect_raw 4.0 /infra2_image_rect_raw
rosrun topic_tools throttle messages /camera/imu 200.0 /imu
d) 录制Camera数据包
确认前几步都做好后,我们将标定板固定在某处,让相机对着标定板运动,运动的方式是和之前一样的“三转、三移”。这里需要注意的是,一定要让相机对着标定板运动,因为我们需要标定imu,如果相机不动,imu的加速度就一直为0,无法进行标定。
通过如下命令录制camera数据包:
rosbag record -O camera_imu_calibration /infra1_image_rect_raw /infra2_image_rect_raw /imu2修改IMU标定文件
我们之前使用imu_utils工具标定了IMU,但是得到标定文件是不能直接用的,还需要修改成kalibr指定的格式。
原来的格式如下所示:
type: IMU
name: D435i
Gyr:
unit: " rad/s"
avg-axis:
gyr_n: 1.5309108696273642e-03
gyr_w: 2.0703289176602875e-05
x-axis:
gyr_n: 1.4720250697508204e-03
gyr_w: 3.0849898119446267e-05
y-axis:
gyr_n: 1.7709433080656571e-03
gyr_w: 2.0734874137051272e-05
z-axis:
gyr_n: 1.3497642310656153e-03
gyr_w: 1.0525095273311089e-05
Acc:
unit: " m/s^2"
avg-axis:
acc_n: 2.0588163388565360e-02
acc_w: 7.8368470789407288e-04
x-axis:
acc_n: 1.7835189767520132e-02
acc_w: 6.6321457518985427e-04
y-axis:
acc_n: 2.0230802690153690e-02
acc_w: 6.7027913345637114e-04
z-axis:
acc_n: 2.3698497708022258e-02
acc_w: 1.0175604150359932e-03我们需要的是acc_n、acc_w、gyr_n和gyr_w这四个数据,将其对应的填到文件中即可,文件格式如下所示:
#Accelerometers
accelerometer_noise_density: 2.0588163388565360e-02 #Noise density (continuous-time)
accelerometer_random_walk: 7.8368470789407288e-04 #Bias random walk
#Gyroscopes
gyroscope_noise_density: 1.5309108696273642e-03 #Noise density (continuous-time)
gyroscope_random_walk: 2.0703289176602875e-05 #Bias random walk
rostopic: /imu #the IMU ROS topic
update_rate: 200.0 #Hz (for discretization of the values above)3.进行Camera-IMU联合标定
通过如下的命令运行kalibr进行标定:
kalibr_calibrate_imu_camera --target ./yaml/april_s.yaml --cam ./result/camera/camchain-.rosbagcamera_calibration.yaml --imu ./result/imu/D435i_imu_param.yaml --bag rosbag/camera_imu_calibration.bag --bag-from-to 20 130--target:标定板参数信息存放的路径,即我们上面的april_s.yaml的路径。
--cam:Camera的标定文件路径。
--imu:IMU的标定文件路径。
--bag:录制的Camera-IMU数据包的路径。
--bag-from-to:起始和终止时间,单位是秒。为了避免开始录制和结束录制时的抖动,这里取了第30秒到第90秒之间的信息。
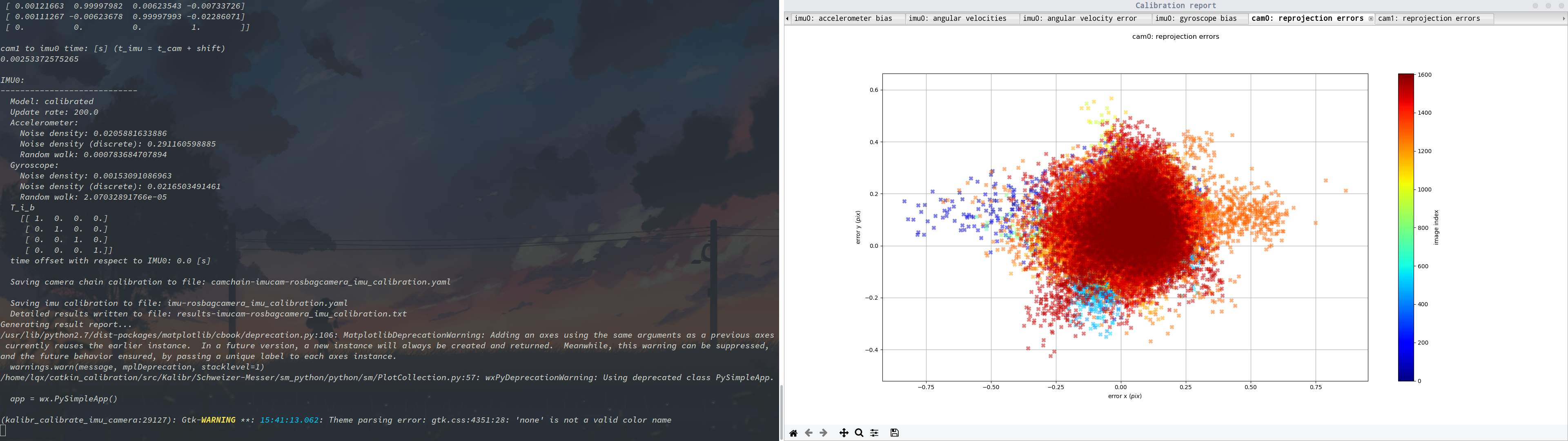
等待一段比较长的时间后会得到标定结果。
最终结果
运行结束后会弹出result report,并且kalibr会自动帮你保存文件。
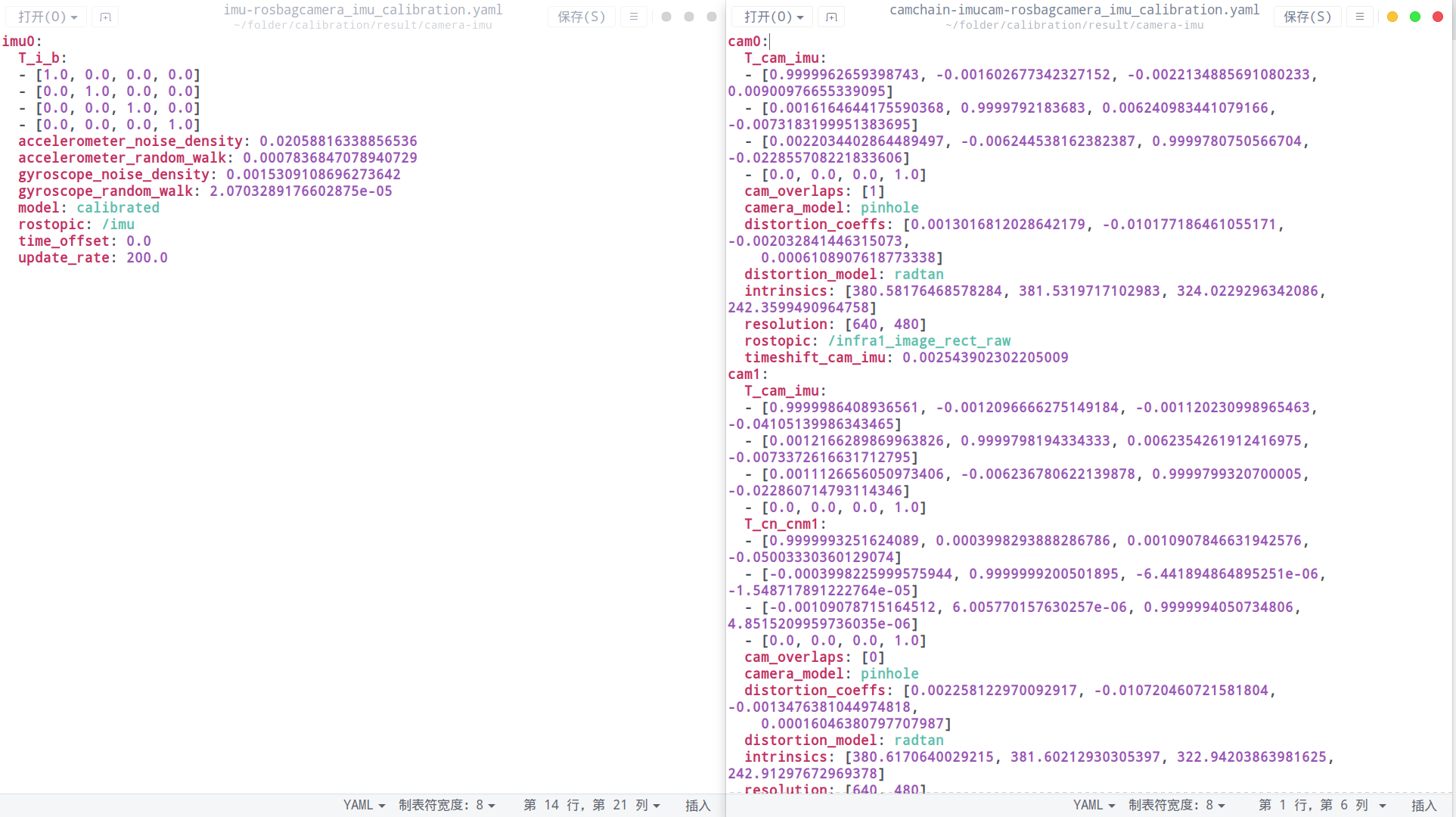
我们最后会得到下图所示的四个文件,其中的yaml文件就是我们最后标定得到的结果。
这两个文件看起来是下面这种样子的: